下面笔记,摘录自——李航,《统计学方法,第二版》,审稿期:2019/12/17-----2019/12/31
如有错误,欢迎斧正!
目录
前言
- 隐马尔可夫模型(hidden Markov model, HMM)是用于标注问题的统计学习模型。
也就是说:需要统计有标记的内容,来建立的一种学习模型。
- 描述由隐藏的马尔可夫链随机生成观测序列的过程。
也就是说:隐马尔可夫模型,是描述了一种过程。 这个过程由隐藏的马尔可夫链随机生成的序列,且作为观测序列。
- 属于生成模型。
也就是说:这个模型是需要大量数据进行训练,生成的。
- 隐马尔可夫广泛应用于:语音识别、自然语言处理、生物信息、模式识别等领域。
1 隐马尔可夫模型的基本概念
1.1 盒子和球模型
先举一个拿球的例子,例子弄明白了,后面的概念公式,就容易理解了。
题目如下:假设有4个盒子,每个盒子里装有红、白两种颜色的球,盒子里的红、白球数量如下:
| 盒子 | 1 | 2 | 3 | 4 |
| 红球数 | 5 | 3 | 6 | 8 |
| 白球数 | 5 | 7 | 4 | 2 |
按照下面的方法抽球,产生一个球的颜色的观测序列:
- 开始,从4个盒子里以等概率(0.25,0.25,0.25,0.25)随机抽取1个盒子,从这个盒子里随机抽出1个球,记录颜色后,放回。
- 然后,从当前盒子随机转移到下一个盒子,规则是:如果当前盒子是盒子1,那么下一盒子一定是2;如果当前盒子是2或3,那么分别以概率0.4和0.6转移到左边或右边的盒子;如果当前盒子是4,那么各以0.5的概率停留在盒子4或转移到盒子3。
| 转移概率 | 1盒子 | 2盒子 | 3盒子 | 4盒子 |
| 初始概率,也就是第一次拿球的概率 | 0.25 | 0.25 | 0.25 | 0.25 |
| 如果上一次是1盒子,这次取球概率 | 0 | 1 | 0 | 0 |
| 如果上一次是2盒子,这次取球概率 | 0.4 | 0 | 0.6 | 0 |
| 如果上一次是3盒子,这次取球概率 | 0 | 0.4 | 0 | 0.6 |
| 如果上一次是4盒子,这次取球概率 | 0 | 0 | 0.5 | 0.5 |
- 确定转移的盒子后,再从这个盒子里随机抽出1个球,记录其颜色,放回。
- 如此下去,重复5次,得到一个球的颜色的观测序列:O = {红,红,白,白,红}
分析如下:
在这个过程中,观测者只能观测到球的颜色的序列,观测不到球是从哪个盒子取出的,即观测不到盒子的序列(状态序列)。
这个例子中,有两个随机序列,一个是盒子的序列(状态序列), 一个是球的颜色的观测序列(观测序列)。前者是隐藏的,后者是可观测的。根据所给条件,可以明确状态集合、观测集合、序列长度、模型的三要素(初始概率,状态转移概率,观测概率)。
盒子对应状态,状态的集合是:Q = {盒子1, 盒子2, 盒子3, 盒子4}, 长度:N = 4
球的颜色对应观测。观测的集合是:V = {红,白}, 长度:M = 2
状态序列(隐藏的抽盒子序列)和观测序列(得到的球的序列)长度 T = 5,
初始化概率分布为: ![]()
状态转移概率分布为:

观测概率分布为:
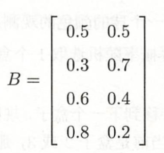
解释 B:
B = {从1盒子拿到红、白球的概率;从2盒子拿到红、白球的概率;从3盒子拿到红、白球的概率;从4盒子拿到红、白球的概率}
1.2 隐马尔可夫模型的定义:
1.2.1 定义
记住上面例子的关键术语,下面概念+公式,就更容易理解。
- 隐马尔可夫模型是关于时序的概率模型,
也就是说:这个模型是根据时间的顺序(即事情发生的先后顺序),推导的下一个事情发生 的概率 的模型。
- 描述由一个隐藏的马尔可夫链随机生成不可观测的状态随机序列,再由各个状态生成一个观测从而产生观测随机序列的过程。
直白地说:有一个过程,隐藏的随机发生,不可知,这个过程叫“隐藏的马尔可夫链”,是一个观测不到的状态,且这个状态是随机的,是根据时间的顺序发生。接着,有好多隐藏的状态发生,然后产生了一个可观测到的结果,就是我们看到的红白球序列。
(上面黑体是定义,只是为了解释,被我拆成了两行)
状态序列:隐藏的马尔可夫链随机生成的状态的序列(跟事件发生了几次有关)。
观测序列:每个状态生成一个观测,而由此产生的观测的随机序列(跟事件发生了几次有关)。
序列的每一个位置又可以看做是一个时刻。
隐马尔可夫模型由三个东西确定:初始概率分布π + 状态转移概率分布 A+ 观测概率分布B。隐马尔可夫模型的形式定义如下:
- 设 Q 是所有可能的状态的集合(对应盒子种类集合),N 是可能的状态数,

- 设 V 是所有可能的观测的集合(对应球种类集合),M 是可能的观测数,

- 设 I 是长度为 T 的状态序列(隐藏的从哪个盒子取的序列),T 是长度,

- 设 O 是对应的观测序列(可看到的红白球的序列),

- A是状态转移概率矩阵:
 ,从一种状态出发,到另一种状态。共有N种状态,所以是N*N。
,从一种状态出发,到另一种状态。共有N种状态,所以是N*N。
其中,![]()
是在时刻 t 处于状态 qi (处于某个盒子)的条件下,在时刻 t+1 转移到状态 qj (处于某个盒子)的概率。
- B是观测矩阵概率:

其中,![]()
是在时刻 t 处于状态 qj (某盒子)的条件下,生成观测 vk (红球还是白球)的概率。
- π 是初始状态概率向量:

其中,![]()
是时刻 t = 1 处于状态 qi 的概率(第一次,选择某个盒子的概率,如例子中,第一次每个盒子被选中的概率都是0.25)。
- A B π 是隐马尔可夫模型的三要素:

状态转移概率矩阵 A 与初始状态概率向量 π 确定了隐藏的马尔可夫链,生成不可观测的状态序列。观测概率 B 确定了如何从状态生成观测(从每个盒子单独抽取红白球的概率),与状态序列综合确定了如何产生观测序列。
1.2.2 隐藏的马尔可夫模型的两个基本假设
(1)齐次马尔可夫性假设。 即假设隐藏的马尔可夫链在任意时刻 t 的状态只依赖于其前一时刻的状态, 与其他时刻的状态及观测无关,也与 t 无关:
![]()
(2)观测独立性假设。即假设任意时刻的观测只依赖于该时刻的马尔可夫链的状态,与其他观测及状态无关(也就是本次选取的红白球,跟之前从哪个盒子选取哪个球没有什么关系,只跟这次是从哪个盒子取的,有关。):
![]()
隐藏的马尔可夫模型可以用于标注,这时状态对应着标记。标注问题是给定观测的序列,预测其对应的标记序列。可以假设标注问题的数量是由隐马尔可夫模型生成的。这样我们可以利用隐藏的马尔可夫模型的学习与预测算法进行标注。
1.2.3 公式证明两个基本假设
用公式证明两个假设:
状态序列 ![]() , 观测序列
, 观测序列 ![]() ,长度为T。也就是抽取的盒子的序列为 I, 看到的球的序列为 O, 共发生了 T 次。
,长度为T。也就是抽取的盒子的序列为 I, 看到的球的序列为 O, 共发生了 T 次。
根据贝叶斯公式可知:P(A|B) = P(A) * P(B|A) / P(B),
对应盒子和球,就是 :P(I|O) = P(I) * P(O|I) / P(O),
其中,
(1)
(1) 结果,根据齐次性假设,t 时刻的状态,只依赖于前一次的状态,上面式子的最后一个连乘公式
(2)
(2)结果,根据独立性假设,o 球的状态,只取决于 i 盒子的状态。
由于分母的观测概率是已发生事件,所以设为1。P(I|O)可以写成下面的形式:
1.3 观测序列的生成过程
根据隐马尔可夫模型定义,可以将一个长度为 T 的观测序列 ![]() 的生成过程描述如下:
的生成过程描述如下:
输入: 隐马尔可夫模型 ![]() ,观测序列长度为 T
,观测序列长度为 T
输出: 观测序列 ![]()
- 按照初始化状态分布 π 产生状态
;
- 令 t = 1;
- 按照状态
的观测概率分布
生成
;
- 按照状态
} 产生

- 令 t = t + 1; 如果 t < T,转步骤 3, 否则,终止。
1.4 隐马尔可夫模型的3个基本问题
隐马尔可夫模型有3个基本问题:
(1)概率计算问题。给定模型![]() ,和观测序列
,和观测序列 ![]() ,计算在模型 λ 下观测序列 O 出现的概率 P(O|λ )。
,计算在模型 λ 下观测序列 O 出现的概率 P(O|λ )。
(2)学习问题。一直观测序列 ![]() ,估计模型
,估计模型 ![]() 参数,使得在该模型下观测序列概率 P(O|λ) 最大。即用极大似然估计的方法估计参数。
参数,使得在该模型下观测序列概率 P(O|λ) 最大。即用极大似然估计的方法估计参数。
(3)预测问题,也称为解码问题。已知模型 ![]() 和观测序列
和观测序列 ![]() ,求对给定观测序列(即已知球的颜色)条件概率 P(I|O) 最大的状态序列
,求对给定观测序列(即已知球的颜色)条件概率 P(I|O) 最大的状态序列 ![]() 。即给定观测序列,求最优可能的对应的状态序列。直白的说:已知球的颜色的序列,求依次选取盒子的序列。
。即给定观测序列,求最优可能的对应的状态序列。直白的说:已知球的颜色的序列,求依次选取盒子的序列。
2 概率计算算法
下面介绍计算观测概率 P(O|λ ) 的前向(forward)与后向(backward)算法。
2.1 直接计算算法
概念可行,但计算上不可行。
给定模型 ![]() 和观测序列
和观测序列 ![]() ,计算观测序列 O 出现的概率 P(O|λ ) 。也就是说:三要素知道了,且看到了取出球个序列。计算一下在前面已经发生的情况下,下一次 O 出现的概率。
,计算观测序列 O 出现的概率 P(O|λ ) 。也就是说:三要素知道了,且看到了取出球个序列。计算一下在前面已经发生的情况下,下一次 O 出现的概率。
最直接的方法是按照概率公式直接计算。通过列举所有可能的长度为 T 的状态序列 ![]() ,求各个状态序列 I 与观测序列
,求各个状态序列 I 与观测序列 ![]() 的联合概率 P(O,I |λ ) ,然后对所有可能的状态序列求和,得到 P(O|λ )。
的联合概率 P(O,I |λ ) ,然后对所有可能的状态序列求和,得到 P(O|λ )。
状态序列 ![]() 的概率是:
的概率是:
![]()
解释: 初始概率乘以每一个盒子的转移概率 ??
对固定的状态序列 ![]() ,观测序列
,观测序列 ![]() 的概率是:
的概率是:
![]()
解释:求某次取出球为O球的概率,就需要把前面每个球的概率,都求出来,然后再继续成上本次球出现的概率。(理解为T叉树,应该是对的,就是每一个结点,下面有T个枝子,都需要计算。)??
O 和 I 同时出现的联合概率为:

然后,对所有可能的状态序列 I 求和,得到观测序列 O 的概率 P(O|λ ) ,即

使用 上面 P(O|λ ) 的公式,计算量很大,是O(TN^T)阶的,所有不可行。下面介绍有效算法,前向-后向算法。
2.2 前向算法
- 前向概率定义: 给定隐马尔可夫模型 λ ,定义到时刻 t ,部分观测序列为
且状态为
的概率为前向概率,记作:
![]()
可以递推地求得前向概率 及观测序列概率 P(O|λ )。
观测序列概率的前向算法推导过程:
- 输入:隐马尔可夫模型 λ , 观测序列 O;
- 输出:观测序列概率 P(O|λ ) 。
(1)初值
![]()
解释:选中某盒子的概率,乘以,从这个盒子中取出某颜色球的概率。(i 理解为第几个盒子)
(2)递推 ,对 t = 1,2,......, T-1,

解释:t 时刻之前的都确定好了,然后 t 时刻乘以当前的转移概率,再乘以从某盒子(第 i 个盒子)抽球的概率。
(3)终止

前向算法,步骤(1)初始化前向概率,是初始时刻的状态 和观测
的联合概率。步骤(2)是前向概率的递推公式,计算到时刻 t + 1 部分观测序列为
且在时刻 t +1 处于
的前向概率,如下图 1 所示:

步骤(2)的方括号里,既然 是到时刻 t 观测到
,并在时刻 t 处于状态
的前向概率,那么乘积
就是到时刻 t 观测到
并在时刻 t 处于状态
而在时刻 t + 1 到达状态
的联合概率。
对这个乘积在时刻 t 的所有可能的 N 个状态 求和,其结果就是到 时刻 t 观测为
并在 t + 1 处于状态
的联合概率。
方括号里的值与观测概率 的乘积恰好是到时刻 t + 1 观测到
并在时刻 t + 1 处于状态
的前向概率
。
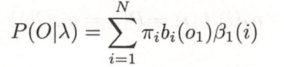
步骤(3)给出P(O|λ ) 的计算公式。因为:
![]()
所以

如图2 所示,前向算法实际是基于 “状态序列的路径结构” 递推计算 P(O|λ ) 的算法。前向算法高效的关键是其局部计算前向概率,然后利用路径结构将前向概率 “递推” 到全局,得到 P(O|λ )。 具体地,在时刻 t = 1, 计算 的 N 个值(i=1,2,...,N)而且每个
的计算利用 前一时刻 N 个
。减少计算量的原因在于每一次计算直接引用前一个时刻的计算结果,避免重复计算。 这样,利用前向概率计算 P(O|λ ) 的计算量是O(N^2 * T)阶的,而不是直接计算的 O(TN^T)阶。

通过一个例子,来说明前向计算的过程。
例2 考虑盒子和球的模型 ![]() ,状态集合 Q = {1,2,3}, 观测集合 V = {红,白},
,状态集合 Q = {1,2,3}, 观测集合 V = {红,白},
初始概率分布π + 状态转移概率分布 A+ 观测概率分布B 如下:

设 T = 3, O = (红,白,红),试用前向算法计算 P(O|λ)。
此例题属于要解决第一个问题:已知模型求观测序列出现的概率。
解:
(1)计算初始值,
第一次拿红球的概率
—— 从1盒子拿红球,π:取1盒的概率;b1(o1),拿取红球的概率
—— 从2盒子拿红球,π:取2盒的概率;b2(o1),拿取红球的概率
—— 从3盒子拿红球,π:取3盒的概率;b3(o1),拿取红球的概率
(2)递推计算
第二次拿白球的概率:
- 从1盒拿白球的概率:
解释:第二次从1盒拿白球的概率 等于 (上一次从1盒拿红球的概率乘以转移到1盒的概率 + 上一次从2盒拿红球的概率乘以转移到1盒的概率 + 上一次从3盒拿红球的概率转移到1盒的概率)求和后,再乘以从1盒拿白球的概率。
- 从2盒拿白球的概率:
- 从3盒拿白球的概率
第三次拿红球的概率:
- 从1盒拿红球的概率:
- 从2盒拿红球的概率:
- 从3盒拿红球的概率:
(3)终止

代码如下:
# coding=utf-8
import numpy as np
class HiddenMarkov:
def forward(self, Q, V, A, B, X, PI):
N = len(Q) # 状态集合的长度(几个盒子)
M = len(X) # 观测序列的长度(实验进行了几次)
alphas = np.zeros((N, M)) # 前向概率矩阵 alphas 矩阵
T = M # 时刻长度,即观测序列的长度
for t in range(T): # 第 t 次
indexOfXi = V.index(X[t]) # 观测值Xi 对应的 V中的索引,即是白球还是红球
for i in range(N): # 对每个状态(盒子)进行遍历
if t == 0: # 计算初值
alphas[i][t] = PI[t][i] * B[i][indexOfXi] # 填充alphas的第0列,为第一次的概率计算
print("alphas_1(%d) = p%d * B%d(x1) = %f" % (i, i, i, alphas[i][t]))
else:
# 计算两个数组的点积(列*列,求和,感觉很奇怪,但事实就是这样的,因为A与alpha就是列相乘)
alphas[i][t] = np.dot([alpha[t - 1] for alpha in alphas], [a[i] for a in A]) * B[i][indexOfXi]
print("alpha_%d(%d) = [sigma(i=0,..,%d ) alpha_%d(i)*ai%d] * B%d(x%d) = %f" % (t, i, len(A), t - 1, i, i, t, alphas[i][t]))
print(alphas)
P = sum(alpha[M - 1] for alpha in alphas) # alphas的最后一列求和
print("P = %f" % P)
Q = [1, 2, 3]
V = ['红', '白']
A = [[0.5, 0.2, 0.3], [0.3, 0.5, 0.2], [0.2, 0.3, 0.5]]
B = [[0.5, 0.5], [0.4, 0.6], [0.7, 0.3]]
X = ['红', '白', '红']
PI = [[0.2, 0.4, 0.4]] # 声明为列数组,1列3行
hmm = HiddenMarkov()
hmm.forward(Q, V, A, B, X, PI)
结果如下:
alphas_1(0) = p0 * B0(x1) = 0.100000
alphas_1(1) = p1 * B1(x1) = 0.160000
alphas_1(2) = p2 * B2(x1) = 0.280000
[[0.1 0. 0. ]
[0.16 0. 0. ]
[0.28 0. 0. ]]
alpha_1(0) = [sigma(i=0,..,3 ) alpha_0(i)*ai0] * B0(x1) = 0.077000
alpha_1(1) = [sigma(i=0,..,3 ) alpha_0(i)*ai1] * B1(x1) = 0.110400
alpha_1(2) = [sigma(i=0,..,3 ) alpha_0(i)*ai2] * B2(x1) = 0.060600
[[0.1 0.077 0. ]
[0.16 0.1104 0. ]
[0.28 0.0606 0. ]]
alpha_2(0) = [sigma(i=0,..,3 ) alpha_1(i)*ai0] * B0(x2) = 0.041870
alpha_2(1) = [sigma(i=0,..,3 ) alpha_1(i)*ai1] * B1(x2) = 0.035512
alpha_2(2) = [sigma(i=0,..,3 ) alpha_1(i)*ai2] * B2(x2) = 0.052836
[[0.1 0.077 0.04187 ]
[0.16 0.1104 0.035512]
[0.28 0.0606 0.052836]]
P = 0.130218
2.3 后向算法
后向概率定义 给定隐马尔可夫模型 λ ,定义在时刻 t 状态为 的条件下,从 t+1 到 T 的部分 观测序列为
的概率为后向概率,记作:
![]()
可以用递推的方法求得后向概率 及观测序列概率
。
观测序列概率的后向算法:
输入:隐马尔可夫模型 λ, 观测序列 O
输出:观测序列概率
(1) ![]()
解释:最后一次发生的概率都为1.
(2)对 t = T-1, T-2, ..., 1

解释:后一个状态(t + 1),由前面 t 的所有可能的状态转移过来。求和。
(3) 
步骤(1)初始化后向概率,对最终时刻的所有状态 规定
。
步骤(2)是后向概率的递推公式。如图3所示。为了计算在时刻 t 、状态为 的条件下,时刻 t + 1 之后的观测序列为
的后向概率
,只需考虑在时刻 t+1 所有可能的 N 个状态
的转移概率(即
项),以及在此状态下的观测
的观测概率(即
项),然后考虑状态
之后的观测序列的后向概率(即
项)。
步骤(3)求 的思路,与步骤(2)一致,只是初始概率
代替转移概率。

利用前向概率和后向概率的定义可以将观测序列 统一写成:

例如:利用后向概率,求解上面的例题:
(1)初始最后一次取值,都默认为1.
beta3(1)=1
beta3(2)=1
beta3(3)=1
(2)预测倒数第三个球(红色),从哪里取出来 (字母角标表示第几行第几列,都从1开始。)
beta2(1)=(a11*b11*beta3(1) + a12*b21*beta3(2) + a13*b31*beta3(3))
= (0.50*0.50*1.00+ 0.20*0.40*1.00+ 0.30*0.70*1.00+ 0)=0.540
(从1盒转移到1盒的概率 * 从1盒取红球的概率 * 上一步从1盒取球的概率 +
从2盒转移到1盒的概率 * 从2盒取红球的概率 * 上一步从2盒取球的概率 +
从3盒转移到1盒的概率 * 从3盒取红球的概率 * 上一步从3盒取球的概率)
beta2(2)=(a21*b11*beta3(1) + a22*b21*beta3(2) + a23*b31*beta3(3))
= (0.30*0.50*1.00+ 0.50*0.40*1.00+ 0.20*0.70*1.00+ 0)=0.490
(从1盒转移到2盒的概率 * 从1盒取红球的概率 * 上一步从1盒取球的概率 +
从2盒转移到2盒的概率 * 从2盒取红球的概率 * 上一步从2盒取球的概率 +
从3盒转移到1盒的概率 * 从3盒取红球的概率 * 上一步从3盒取球的概率)
beta2(3)=(a31*b11*beta3(1) + a32*b21*beta3(2) + a33*b31*beta3(3))
= (0.20*0.50*1.00+ 0.30*0.40*1.00+ 0.50*0.70*1.00+ 0)=0.570
(从1盒转移到3盒的概率*从3盒取红球的概率*上一步从1盒取球的概率 +
从2盒转移到3盒的概率*从2盒取红球的概率*上一步从2盒取球的概率 +
从3盒转移到3盒的概率*从3盒取红球的概率*上一步从3盒取球的概率)
(3)预测倒数第二个球(白色),从哪里来取出来
beta1(1)=(a11*b12*beta2(1) + a12*b22*beta2(2) + a12*b32*beta2(3))
= (0.50*0.50*0.54+ 0.20*0.60*0.49+ 0.30*0.30*0.57+ 0)=0.245
beta1(2)=(a21*b12*beta2(1) + a22*b22*beta2(2) + a23*b32*beta2(3))
= (0.30*0.50*0.54+ 0.50*0.60*0.49+ 0.20*0.30*0.57+ 0)=0.262
beta1(3)= (a31*b12*beta2(1) + a32*b22*beta2(2) + a33*b32*beta2(3))
= (0.20*0.50*0.54+ 0.30*0.60*0.49+ 0.50*0.30*0.57+ 0)=0.228
(4)预测倒数第一个球(红色),从哪里取出来
P(X|lambda) = 0.2 * 0.5 *0.245 + 0.4 * 0.4 * 0.262 + 0.4 * 0.7 * 0.228 = 0.1302182.4 一些概率与期望值的计算
(这部分没看明白,先记录下来,万一以后有机会弄懂呢)
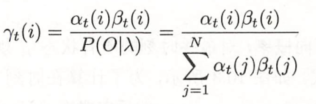
利用前向概率和后向概率,可以得到关于单个状态和两个状态概率的计算公式。
1. 给定模型 λ 和观测 O, 在时刻 t 处于状态 的概率。记为
![]()
可以通过前后向概率计算。事实上,

由前向概率 和后向概率
定义可知:
![]()
于是得到:
2. 给定模型 λ 和观测 O ,在时刻 t 处于状态 且在时刻 t + 1, 处于
的概率:
![]()
可以通过前向后向概率计算:

而
![]()
所以

3. 将 和
对应各个时刻 t 求和,可以得到一些有用的期望值。
(1)在观测O下,状态 i 出现的期望值:
(2)在观测O 下,由状态 i 转移的期望值: 
(3)在观测 O 下,由状态转移到状态 j 的期望值:
3 学习算法
隐马尔可夫模型的学习,根据训练数据 是包括 观测序列和对应的状态序列还是只有观测序列,可以分别由监督学习与无监督学习(Baum-Welch 即 EM 算法)实现。有监督学习可以解决隐马尔可夫模型的第二个问题:已知观测序列,求模型的参数
3.1 监督学习算法
假设已给训练数据包含 S 个长度相同的观测序列和对应的状态序列, (可以理解为:知道哪次从哪个盒子拿出哪种球)。 那么可以利用极大似然估计法来估计隐马尔可夫模型的参数。
1 转移概率 的估计,即从i 转移到 j 的概率。
设样本中,时刻 t 处于状态 i, 时刻 t + 1 转移到状态 j 的频数为 ,那么状态转移概率
的估计是:

解释:在整个S 序列中,查到 Aij 出现的次数,然后计算 Ai 转移到所有 j 的次数,前者占后者的百分比,即为aij。
2 观测概率 的估计
设样本中状态为 j(盒子) ,并观测为 k(红白球) 的频数是 (j 盒子取出 k颜色球 的个数), 那么状态为 j 观测为 k 的概率
的估计是:

解释:j 盒子取出 k颜色球 的次数,占总体情况(从 j 盒子 取出的所有球次数)的比值。
3 初始状态概率 的估计
为 S 个样本初始状态为
的频率
(解释:根据已知的S序列,可以求出每个盒子中每种球出现的频率,即可以当做概率 πi)
由于监督学习需要使用标注的训练数据,而人工标注训练数据往往代价很高,有时就会利用无监督学习的方法。
3.2 Baum-Welch算法
【此部分先跳过,太难懂了。】
假设给定训练数据,只包含S个长度为T的观测序列 {}, 而没有对应的状态序列,目标是学习隐马尔可夫模型
![]() 的参数。 将观测序列数据看做观测数据 O,状态序列数据看做不可观测的隐藏数据 I ,那么隐马尔可夫模型事实上,是一个含有隐变量的概率模型:
的参数。 将观测序列数据看做观测数据 O,状态序列数据看做不可观测的隐藏数据 I ,那么隐马尔可夫模型事实上,是一个含有隐变量的概率模型:

它的参数学习可以由EM 算法实现。
1 确定完全数据的对数似然函数
2 EM 算法的E 步:
......
3.3 标注偏置问题
https://blog.csdn.net/lskyne/article/details/8669301
4 预测算法
下面介绍隐马尔可夫模型预测的两种算法:近似算法与维特比算法(Viterbi algorithm)
这是解决隐马尔可夫模型的第三个问题:已知观测序列求可能的状态序列
4.1 近似算法
近似算法的思想是:在每个时刻 t 选择在该时刻最有可能出现的状态 ,从而得到一个状态序列
, 将它作为预测的结果。
给定隐马尔可夫模型 λ 和观测序列 O, 在时刻 t 处于状态 的概率
是:

在每一时刻 t 最有可能的状态 是:

从而得到状态序列 。
近似算法的优点是计算简单,其缺点是不能保证预测的状态序列整体是最有可能的状态序列,因为预测的状态序列可能有实际不发生的部分。事实上,上述方法得到的状态序列中,有可能存在转移概率为 0 的相邻状态,即对某些 i, j, aij = 0 时。 尽管如此,近似算法仍然是有用的。
4.2 维特比算法(Viterbi algorithm)
4.2.1 先铺垫一个例子,有助于理解后面的概念及公式。
例子 3 已知模型![]() ,观测序列 O=(红,白,红),试求最优状态序列,即最优路径
,观测序列 O=(红,白,红),试求最优状态序列,即最优路径 ![]()

解:理解好题目,其实求最优路径,也就是求,抽取盒子的顺序。
(1)初始化,在 t = 1时,对每一个状态 i ,i = 1,2,3, 求状态为 i 的观测 为红球的概率,记此概率为
,则:
- 第一次从1盒抽红球的概率:
- 第一次从2盒抽红球的概率:
- 第一次从3盒抽红球的概率:
记 , i = 1,2,3. 因为开始不知道是从哪个盒子开始的,此处先设为0.
(2)在 t = 2 时(即第二次抽取),(i = 1,2,3), 求在 t = 1 时状态(把状态理解为:盒子几)为 j 观测为红并在 t = 2 时,状态为 i,观测 为白球的路径的最大概率。(通俗讲:第t次为i 盒子的红球,第j次为白球,求 j 是哪个盒子的最大概率) 。 记此最大概率为
, 则:

- 从上次抽盒结果 分别转移到 1盒抽取白球的概率,取最大概率:
—— 1盒的第二次转移,从3盒子转移过来的概率最大,所以取3盒子。
- 从上次抽盒结果 分别转移到 2盒抽取白球的概率,取最大概率:
—— 2盒的第二次转移,从3盒子转移过来的概率最大,所以取3盒子
- 从上次抽盒结果 分别转移到 3盒抽取白球的概率,取最大概率:
—— 3盒的第二次转移,从3盒子转移过来的概率最大,所以取3盒子
(3)同样, 在 t = 3 时,
- 从上次抽盒结果 分别转移到 1盒抽取白球的概率,取最大概率:
——1盒的第3次转移,从2盒子转移过来的概率最大。
- 从上次抽盒结果 分别转移到 2盒抽取白球的概率,取最大概率:
——2盒的第3次转移,从2盒子转移过来的概率最大。
- 从上次抽盒结果 分别转移到 3盒抽取白球的概率,取最大概率:
——3盒的第3次转移,从3盒子转移过来的概率最大。

(4) 以 P* 表示最优路径的概率,则, P* = max (0.0147, 0.01008, 0.007056) = 0.0147,
最优路径的终点是
(5) 由最优路径的终点,i*3, 逆向找到 i*2, i*1:

于是,求的最优路径,即为最优状态序列 ![]()
代码:
class HiddenMarkov:
def viterbi(self, Q, V, A, B, X, PI):
N = len(Q) # 状态集合的长度(几个盒子)
M = len(X) # 观测序列的长度(实验进行了几次)
deltas = np.zeros((N, M)) # 前向概率矩阵 alphas 矩阵
psis = np.zeros((N, M)) # 记录路径, 存储的每一次概率最大的值盒子
Y = np.zeros((1, M)) # 最优(概率最大)的状态序列
for t in range(M): # 第t次
realT = t + 1 # 状态号从1开始
indexofXi = V.index(X[t])
for i in range(N): # 第 i 个盒子
realI = i + 1 # 盒子号从1开始
if t == 0: # 第一次取球
deltas[i][0] = PI[0][i] * B[i][indexofXi] # 初始值
psis[i][0] = 0 # 第一次初始psis[i][0]为0
print("delta_1(%d) = pi_%d * B%d(x1) = %.2f * %.2f = %.2f" % (realI, realI, realI, PI[0][i], B[i][indexofXi], deltas[i][0]))
print('psis_1(%d) = 0' % realT) # 第一次没有决定从哪个盒子取,所以先定为0
print()
else:
deltas[i][t] = np.max(
np.multiply([delta[t-1] for delta in deltas], [a[i] for a in A])
) * B[i][indexofXi]
temp = np.max(np.multiply([delta[t-1] for delta in deltas], [a[i] for a in A])) # 保存最大值
print("delta_%d(%d) = max[delta_%d(j) * Aj%d] * B%d(x%d) = %.2f * %.2f = %.5f" % (realT, realI, t, realI, realI, realT, temp, B[i][indexofXi], deltas[i][t]))
psis[i][t] = np.argmax(np.multiply([delta[t-1] for delta in deltas], [a[i] for a in A])) + 1
print("psis_%d(%d) = argmax[delta_%d(j)Aj%d] = %d" % (realT, realI, t, realI, psis[i][t]))
print()
print("deltas: \n", deltas)
print("psis:\n", psis)
print()
# 最后一列的最大值的索引
Y[0][M-1] = np.argmax([delta[M-1] for delta in deltas]) + 1 # 序号从1开始, 沿着给定轴,返回最大值的索引。
print("Y[0][M-1]: \n", Y[0][M-1])
print("Y%d=argmax[deltaT(i)]=%d" % (M, Y[0][M-1])) # 最优路径的终点
print()
for t in range(M-2, -1, -1): # 逆向推导最优路径, 倒着扫描,间隔为1。填充Y时,也倒着填充
Y[0][t] = psis[int(Y[0][t+1]) - 1][t+1] # psis的索引
print("Y%d = psis%d(Y%d) = %d" % (t+1, t+2, t+2, Y[0][t]))
print()
print("最大概率的状态序列 Y 是:", Y)
Q = [1, 2, 3]
V = ['红', '白']
A = [[0.5, 0.2, 0.3], [0.3, 0.5, 0.2], [0.2, 0.3, 0.5]]
B = [[0.5, 0.5], [0.4, 0.6], [0.7, 0.3]]
X = ['红', '白', '红']
PI = [[0.2, 0.4, 0.4]] # 声明为列数组,1行3列
hmm = HiddenMarkov()
hmm.viterbi(Q, V, A, B, X, PI)结果:
delta_1(1) = pi_1 * B1(x1) = 0.20 * 0.50 = 0.10
psis_1(1) = 0
delta_1(2) = pi_2 * B2(x1) = 0.40 * 0.40 = 0.16
psis_1(1) = 0
delta_1(3) = pi_3 * B3(x1) = 0.40 * 0.70 = 0.28
psis_1(1) = 0
delta_2(1) = max[delta_1(j) * Aj1] * B1(x2) = 0.06 * 0.50 = 0.02800
psis_2(1) = argmax[delta_1(j)Aj1] = 3
delta_2(2) = max[delta_1(j) * Aj2] * B2(x2) = 0.08 * 0.60 = 0.05040
psis_2(2) = argmax[delta_1(j)Aj2] = 3
delta_2(3) = max[delta_1(j) * Aj3] * B3(x2) = 0.14 * 0.30 = 0.04200
psis_2(3) = argmax[delta_1(j)Aj3] = 3
delta_3(1) = max[delta_2(j) * Aj1] * B1(x3) = 0.02 * 0.50 = 0.00756
psis_3(1) = argmax[delta_2(j)Aj1] = 2
delta_3(2) = max[delta_2(j) * Aj2] * B2(x3) = 0.03 * 0.40 = 0.01008
psis_3(2) = argmax[delta_2(j)Aj2] = 2
delta_3(3) = max[delta_2(j) * Aj3] * B3(x3) = 0.02 * 0.70 = 0.01470
psis_3(3) = argmax[delta_2(j)Aj3] = 3
deltas:
[[0.1 0.028 0.00756]
[0.16 0.0504 0.01008]
[0.28 0.042 0.0147 ]]
psis:
[[0. 3. 2.]
[0. 3. 2.]
[0. 3. 3.]]
Y[0][M-1]:
3.0
Y3=argmax[deltaT(i)]=3
Y2 = psis3(Y3) = 3
Y1 = psis2(Y2) = 3
最大概率的状态序列 Y 是: [[3. 3. 3.]]4.2.2 概念
维特比算法实际是用动态规划解隐马尔可夫预测模型问题,即用动态规划概率最大路径(最优路径)。这时一条路径对应着一个状态序列(盒子序列)。
根据动态规划原理,最优路径具有这样的特性:
如果最优路径在时刻 t 通过结点 ,那么这一路经从结点
到终点
的部分路径,对于从
到
的所有可能的部分路径来说,必须是最优的。因为加入不是这样,那么从
到
就有另一条更好的部分路径存在,如果把它和从
到达
的部分路径连接起来,就会形成一条比原来的路径更优的路径,这是矛盾的。
依据这一原理,只需要从时刻 t = 1 开始,递推地计算在时刻 t 状态为 i 的各条部分路径的最大概率,直至得到 t = T 状态为 i 的各条路径的最大概率。 时刻 t = T 的最大概率,即为最优路径的概率 P*, 最优路径的终点 也同时得到。 之后,为了找出最优路径的各个结点, 从终点
开始,右后向前逐步求得结点
得到最优路径
,这就是维特比算法。
公式推导:
首先导入两个变量 和
。定义在时刻 t 状态为i 的所有单个路径
中概率最大值为:

上面公式 可以理解为:max(从i盒子转移到i+1盒子的概率 )* i 盒子中抽中o颜色球的概率,取所有转移的最大值 乘以 球颜色的概率。
由定义可得 的地推公式:

定义在时刻 t 状态为 i 的所有单个路径 中概率最大的路径的第 t -1 个结点为:
![]()
算法:
输入:模型 ![]() 和观测
和观测 ![]()
输出:最优路径
(1)初始化

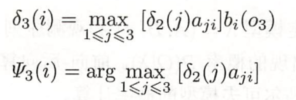
(2)递推。对 t = 2,3,...,T

i ,j :可以当做第几个盒子,
aji:表示从第 j 个盒子转移到第 i 个盒子,
bi(ot):从第i个盒子中抽出一个球,球的颜色为 o 中第 t 个球的颜色 ,的概率。
ψ :根据概率,取概率最大的盒子, 跟 i 相同。
(3)终止

按着顺序求解完成所有盒子,即可终止。
(4)最优路径回溯。 对 t = T -1, T-2, ..., 1
![]()
其实每一步,都有记录ψ,顺着回溯回去,即可找到盒子的最优路径,
