1、特别说明
本博客是在复现大神博客的过程中遇到问题的解决方式,具体的博客地址是:
https://blog.csdn.net/AdamShan/article/details/83015570#commentsedit
写的非常好的博主,在此大力推荐!!!
2、实现过程
1.下载原博主的代码文件夹euclidean_cluster放在pcl_ws文件夹下
2.catkin_make
3.source ~/catkin_ws/devel/setup.bash
4.开四个终端分别执行以下指令:
1.cd ~/pcl_ws
roslaunch pcl_test pcl_test.launch
2.cd ~/pcl_ws/src/pcl_test
rosbag play --clock test.bag
3.cd ~/pcl_ws/src/euclidean_cluster
roslaunch euclidean_cluster euclidean_cluster.launch
4.cd ~
rosrun rviz rviz
5.一切顺利的话应该可以看到效果了,但是如果有问题,请参考下面的内容
3、问题汇总
本部分主要关注代码实现过程中存在的问题。
错误1:Could not find the required component ‘jsk_recognition_msgs’.
解决:sudo apt-get install ros-kinetic-jsk-recognition-msgs
错误2:Could not find library corresponding to plugin jsk_rviz_plugin/BoundingBoxArray. Make sure the plugin description XML file has the correct name of the library and that the library actually exists.
解决:sudo apt-get install ros-kinetic-jsk-rviz-plugins
错误3:rviz不出图
解决:
1.Fixed Frame要设置为velodyne
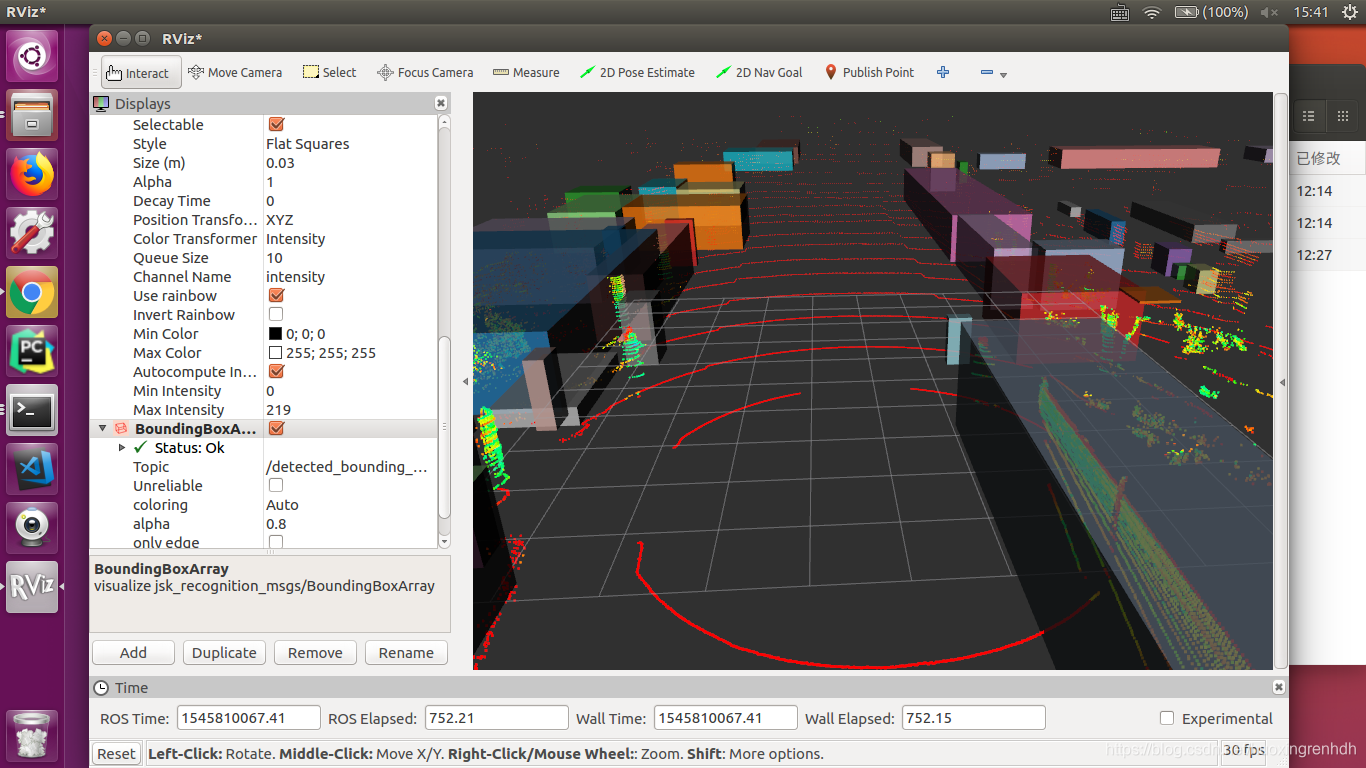
2.Add->By display type-> BoundingBoxArray->Topic=/detected_bounding_boxs
4.效果