构建Autoware
首先安装好依赖(Ubuntu 16.04)
- 必需的库
sudo apt-get update
sudo apt-get install -y python-catkin-pkg python-rosdep python-wstool ros-$ROS_DISTRO-catkin libmosquitto-dev gksu
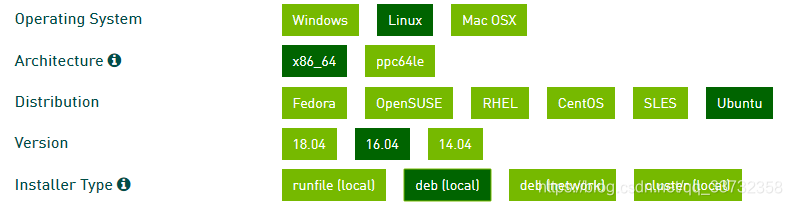
- cuda(vision模块必须的)
下载Cuda(cuda下载链接),选择好合适的版本,下面是我的选择。
安装好后,在/usr/local/目录下可以找到cuda目录,也许是cuda-9.0也许是cuda或者是别的,反正对应着cuda的版本。
如果已经是cuda则不需要软链接目录,否则执行下面命令
sudo ln -s cuda-9.0 cuda
cd cuda
sudo ln -s lib lib64
配置cuda环境变量
sudo vi /ect/profile
然后添加
PATH="/usr/local/cuda:$PATH"
LD_LIBRARY_PATH="/usr/local/cuda/lib:$LD_LIBRARY_PATH"
最后应用修改
source /ect/profile
开始构建
cd ~/Autoware/ros/src
catkin_init_workspace
cd ../
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
./catkin_make_release
若出现as: Cannot locate rosdep definition for [module_comm_msgs],则将src所有文件中的module_comm_msgs替换成automotive_platform_msgs。然后重新在~/Autoware/ros目录下执行
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
./catkin_make_release
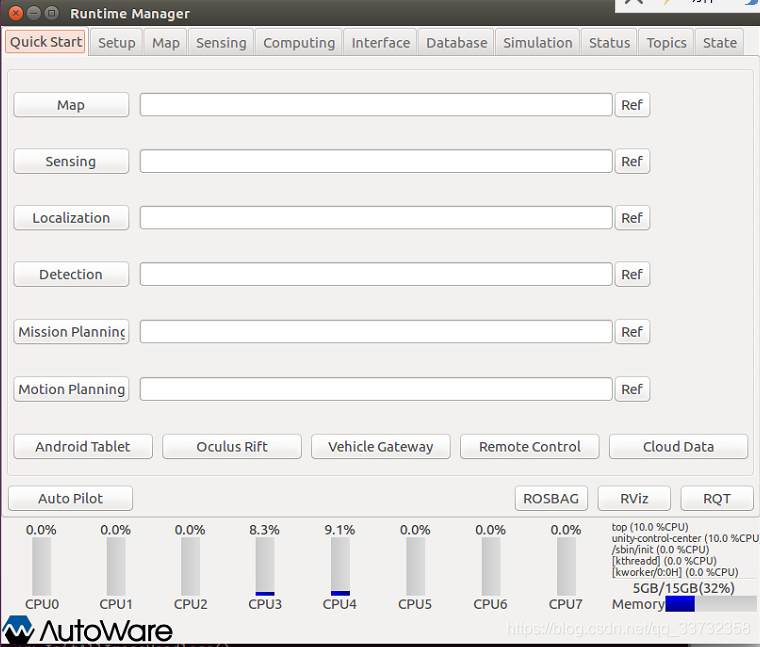
启动Autoware
cd ~/Autoware/ros
./run
出现如下窗口则启动正常