Robust semantic segmentation by dense fusion network on blurred vhr remote sensing images
说明se的设计还是很有用的
Abstract: By proposing a cascaded dense encoder-decoder network and the selayer based fusion and assembling techniques.
1.Introduction
Modified hourglasses network
Deeplab v2 and v3
实际上,遥感影像很容易被camera shakes or nosie pollution污染。
最近,一些研究人员[6]报道了使用高度信息(DSM)可以显着改善分类结果。然而,在缺陷图像的鲁棒性方面,在语义分割的背景下尚未充分研究多种模态和光谱的融合。
Lveraging dense block and designing a new hourglass convolutional network to obtain pixel-acuurate segmentation of defective images.
Contributions:
1).它设计了一种新的神经网络,用于鲁棒语义分割,利用级联密集块聚合多模态信道中的上下文信息,并使用新颖的Up块消除上采样过程中的噪声。
2).它开发了SEMix模型,以更好地融合DSM和光谱图像。
3). 引入了一系列SConv块来学习每个类别的动态权重,从而提高不平衡类别的性能。
2. Methodology
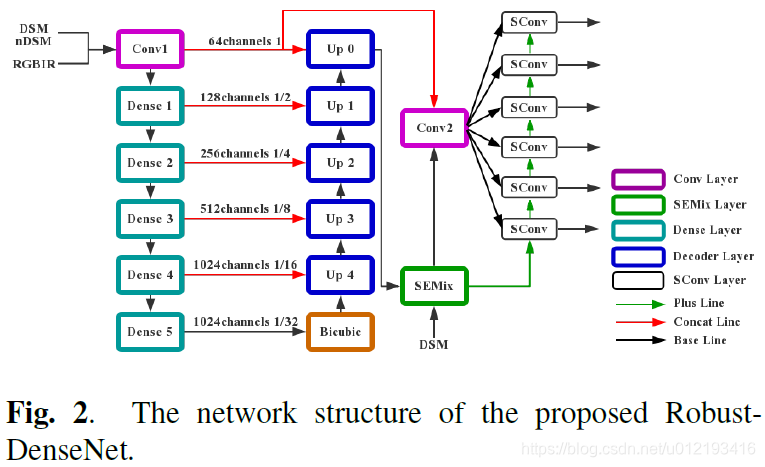
RobustDensenet :
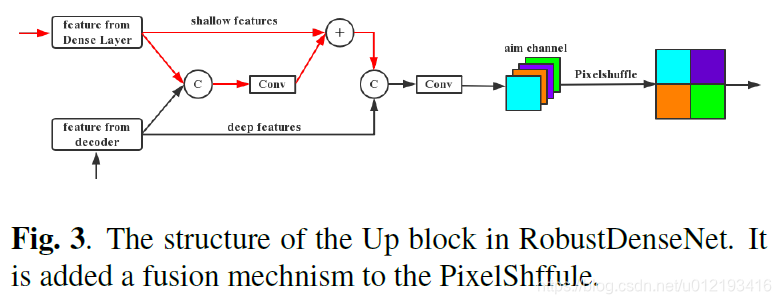
UP block
2.1 SEMix

2.2 Sconv
Sconv与类别数目保持一致。
We use cross entropy as loss function for robustdensenet

3. Experiments and analysis
Potsdam dataset
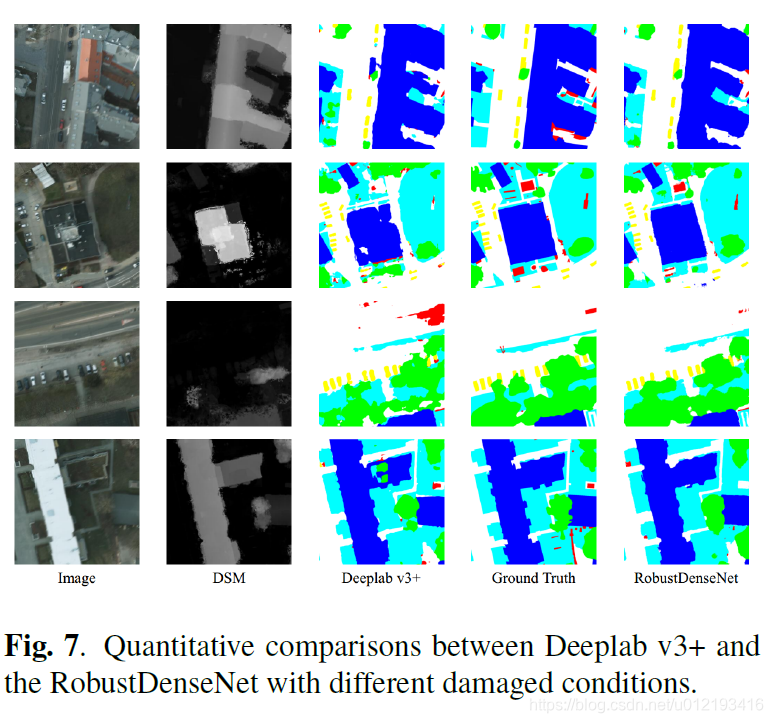
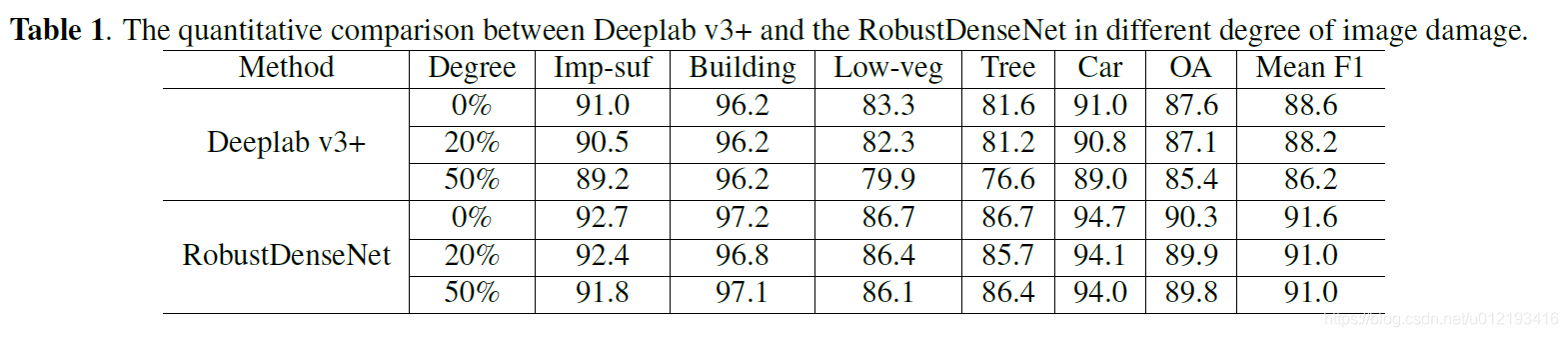
实验结果列于表1中。随着模糊或损坏像素的面积增加(从无到50%),所提出的RobustDenseNet在整体精度和F1指标上都取得了稳定的表现。总体准确率从90.3略微下降到89.8,这可能是由于Car级(从94.7到94.0)和Imp-suf级(从92.7到91.8)的下降。相反,Deeplab v3 +,即使是语义分割的最新模型,也在稳健性测试中失败了。其平均F1得分从88.6降至86.2,总体准确率下降了2.4%。图8显示了整体精度和F1度量的变化趋势,因为像素模糊或损坏的面积增加。据观察,RobustDenseNet的降低速度比Deeplab V3 +慢。
和目前精度最高的算法比鲁棒性也没有什么问题