版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/u010918541/article/details/72553108
本笔记学习于优达学城 Artificial Intelligence for Robotics课程
什么是粒子滤波器,请看下面几幅图片
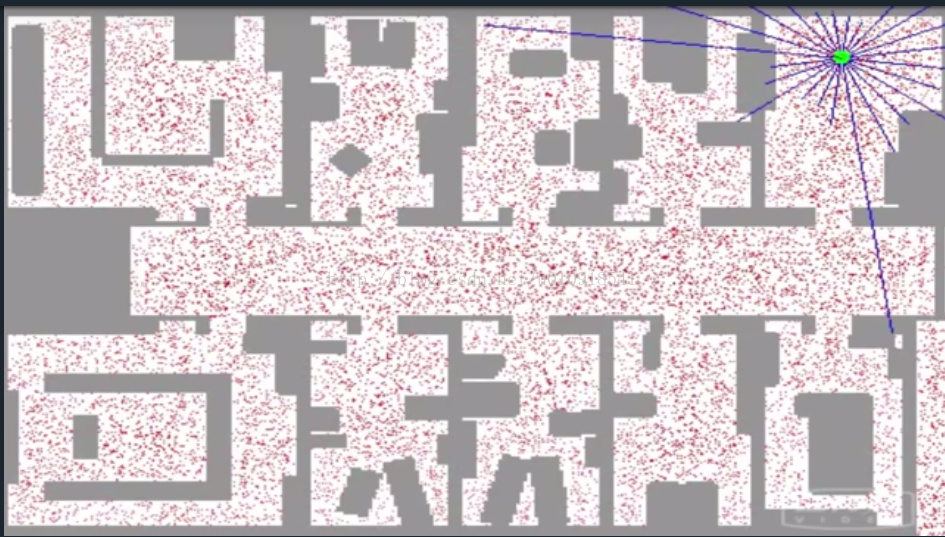
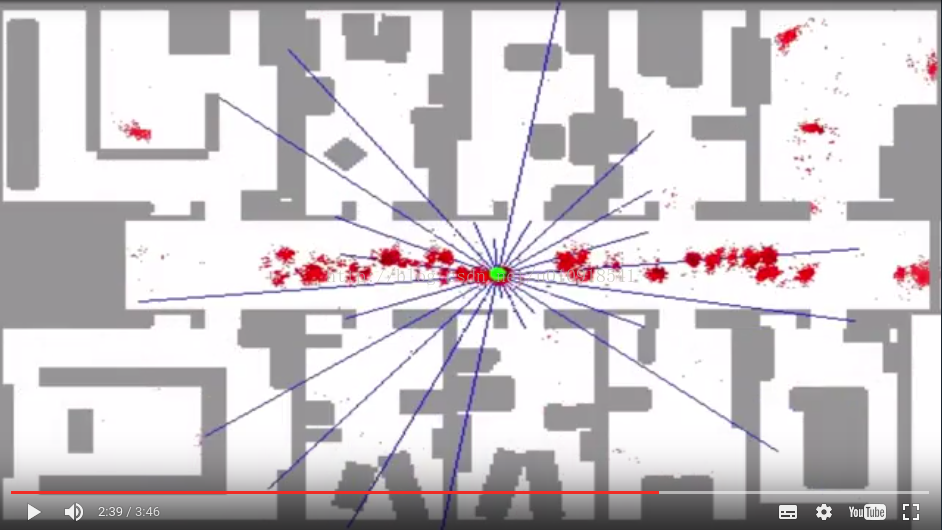
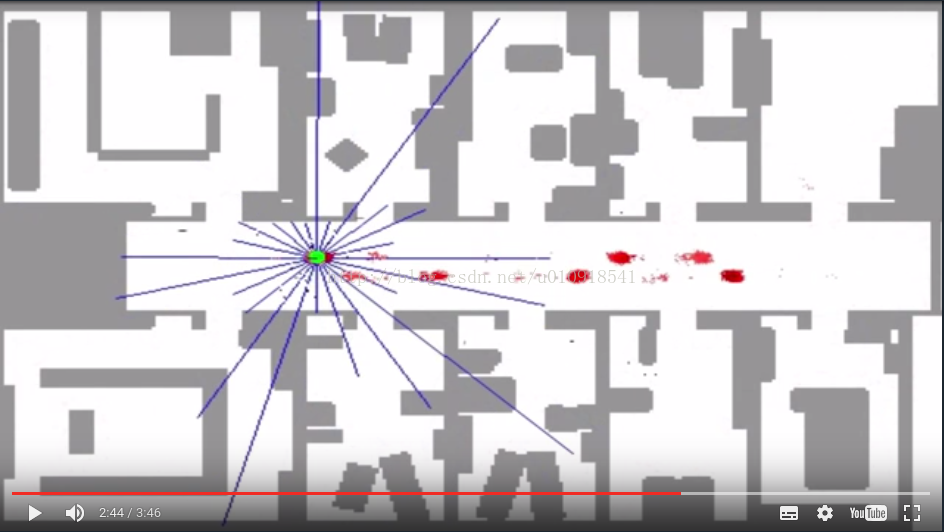
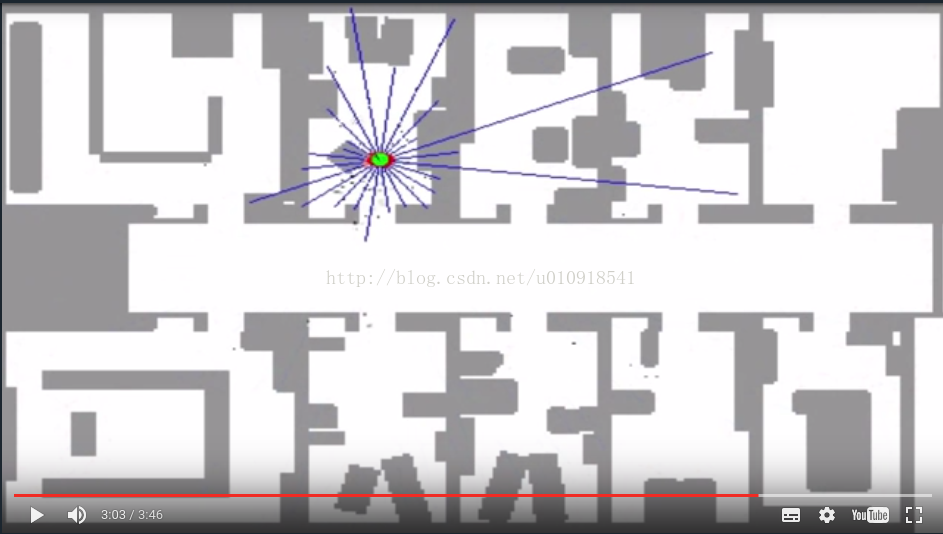
在整个空间内有无数关于机器人的位置坐标以及方向的粒子 [x,y,orientation],随着机器人的移动感知周围空间,这些粒子将获得自己的权重,然后进行筛选,最后粒子逐渐收敛到一起。这个就是粒子滤波器的基本原理。
首先创建好一个机器人的类,机器人可以移动,设定方向,设定误差
# -*- coding: utf-8 -*-
from math import *
import random
#机器人四个参照物
landmarks = [[20.0, 20.0], [80.0, 80.0], [20.0, 80.0], [80.0, 20.0]]
#地图大小
world_size = 100.0
class robot:
def __init__(self):
self.x = random.random() * world_size
self.y = random.random() * world_size
self.orientation = random.random() * 2.0 * pi
#给机器人初试化一个坐标和方向
self.forward_noise = 0.0;
self.turn_noise = 0.0;
self.sense_noise = 0.0;
def set(self, new_x, new_y, new_orientation):
#设定机器人的坐标 方向
if new_x < 0 or new_x >= world_size:
raise ValueError, 'X coordinate out of bound'
if new_y < 0 or new_y >= world_size:
raise ValueError, 'Y coordinate out of bound'
if new_orientation < 0 or new_orientation >= 2 * pi:
raise ValueError, 'Orientation must be in [0..2pi]'
self.x = float(new_x)
self.y = float(new_y)
self.orientation = float(new_orientation)
def set_noise(self, new_f_noise, new_t_noise, new_s_noise):
# makes it possible to change the noise parameters
# this is often useful in particle filters
#设定一下机器人的噪声
self.forward_noise = float(new_f_noise);
self.turn_noise = float(new_t_noise);
self.sense_noise = float(new_s_noise);
def sense(self):
#测量机器人到四个参照物的距离 可以添加一些高斯噪声
Z = []
for i in range(len(landmarks)):
dist = sqrt((self.x - landmarks[i][0]) ** 2 + (self.y - landmarks[i][1]) ** 2)
dist += random.gauss(0.0, self.sense_noise)
Z.append(dist)
return Z
def move(self, turn, forward):
#机器人转向 前进 并返回更新后的机器人新的坐标和噪声大小
if forward < 0:
raise ValueError, 'Robot cant move backwards'
# turn, and add randomness to the turning command
orientation = self.orientation + float(turn) + random.gauss(0.0, self.turn_noise)
orientation %= 2 * pi
# move, and add randomness to the motion command
dist = float(forward) + random.gauss(0.0, self.forward_noise)
x = self.x + (cos(orientation) * dist)
y = self.y + (sin(orientation) * dist)
x %= world_size # cyclic truncate
y %= world_size
# set particle
res = robot()
res.set(x, y, orientation)
res.set_noise(self.forward_noise, self.turn_noise, self.sense_noise)
return res
def Gaussian(self, mu, sigma, x):
# calculates the probability of x for 1-dim Gaussian with mean mu and var. sigma
return exp(- ((mu - x) ** 2) / (sigma ** 2) / 2.0) / sqrt(2.0 * pi * (sigma ** 2))
def measurement_prob(self, measurement):
# calculates how likely a measurement should be
#计算出的距离相对于正确正确的概率 离得近肯定大 离得远就小
prob = 1.0;
for i in range(len(landmarks)):
dist = sqrt((self.x - landmarks[i][0]) ** 2 + (self.y - landmarks[i][1]) ** 2)
prob *= self.Gaussian(dist, self.sense_noise, measurement[i])
return prob
# 初始化一个机器人
myrobot = robot()
#设定噪声
myrobot.set_noise(5.0,0.1,5.0)
#设定初始位置
myrobot.set(30,50,0.5)
#打印位置方向
print myrobot
#打印与四个参照物的距离
Z=myrobot.sense()
print Z
#机器人移动
myrobot=myrobot.move(pi/2,10.0)
print myrobot
Z=myrobot.sense()
print Z接下来就是粒子滤波部分,首先在运动初期给机器人初始化1000个位置粒子,这些粒子随机分布在整个地图,就上上面的第一张图片一样。然后机器人移动,粒子跟随移动,然后计算各个粒子的权重
myrobot=robot()
myrobot.move(0.1,5.0)
Z=myrobot.sense()
N=1000
#初始化一千个粒子
p=[]
for i in range( N):
x=robot()
x.set_noise(0.05,0.05,5.0)
p.append(x)
print len(p)
p2=[]
for i in range(N):
p2.append(p[i].move(0.1,5.0))
p=p2
#计算各个粒子的权重
w=[]
for i in range(N):
w.append(p[i].measurement_prob(Z))
print w下一篇 更新粒子滤波器 Resampling 降低粒子个数 挑选出重要的粒子 完成粒子滤波器的设计