概率图模型+ 时间 -------->动态模型

动态模型有下面三种:
如果状态是离散的,就是我们上一节提到了Hidden Markov Model (HMM);
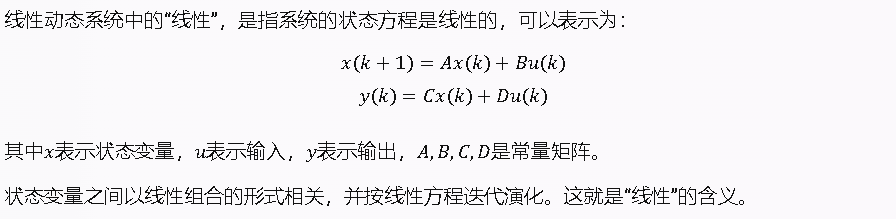
如果状态是连续的,如果状态之间的关系是线性的,就是Linear Dynamic System (Kalman Filter),或者说是Linear Gaussian Model;
如果状态之间的关系是Non-Linear 的或者Non-Gaussian 的,那么也就是Particle Filter。
其中HMM的如下图所示 :

Kalman Filter是基于高斯分布的假设来进行状态估计的算法。Kalman Filter假设系统的状态变量和观测变量都服从高斯分布,并且用均值和协方差来描述它们。高斯分布有一些重要的性质,使得Kalman Filter可以用矩阵运算来简化计算和表示,以及达到最优的估计效果。
Kalman Filter VS Particle Filter
- Kalman Filter是基于线性投影的,而Particle Filter是基于顺序蒙特卡罗方法的。这意味着Kalman Filter需要知道系统的动力学模型和观测模型,并且假设它们都是线性的或者可以线性化的;而Particle Filter不需要这样的假设,它只需要知道系统的状态转移概率和观测概率,它们可以是任意的非线性函数。
- Kalman Filter是基于高斯分布的,而Particle Filter是基于任意分布的。这意味着Kalman Filter需要假设系统的状态变量和观测变量都服从高斯分布,并且用均值和协方差来描述它们;而Particle Filter不需要这样的假设,它可以处理任意形状的分布,并且用一组随机样本来近似它们。
- Kalman Filter是最优的,而Particle Filter是次优的。这意味着Kalman Filter在满足其假设条件下,可以达到最小均方误差;而Particle Filter则不能保证这一点,它只能根据样本数量和重采样策略来提高精度。
- Kalman Filter是计算效率高的,而Particle Filter是计算效率低的。这意味着Kalman Filter只需要进行矩阵运算和卡尔曼增益更新,而Particle Filter则需要进行重复采样、权重计算和重采样等操作。