前言:hector_slam可以很好的在空中机器人,手持构图设备及特种机器人中运行。
hector_slam不需要订阅里程计信息/odmo消息,而是直接使用激光估算里程计信息,因此,当机器人速度较快时会发生打滑现象,导致建图效果出现误差。
一、安装hector_slam功能包
ros中已集成了hector_slam功能包
sudo apt-get install ros-kinetic-hector-slam
二、在Gzebo中仿真SLAM
2.1 启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch
roslaunch mrobot_laser_nav_gazebo.launch
2.2 启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch
roslaunch hector_demo.launch
2.3 启动键盘控制
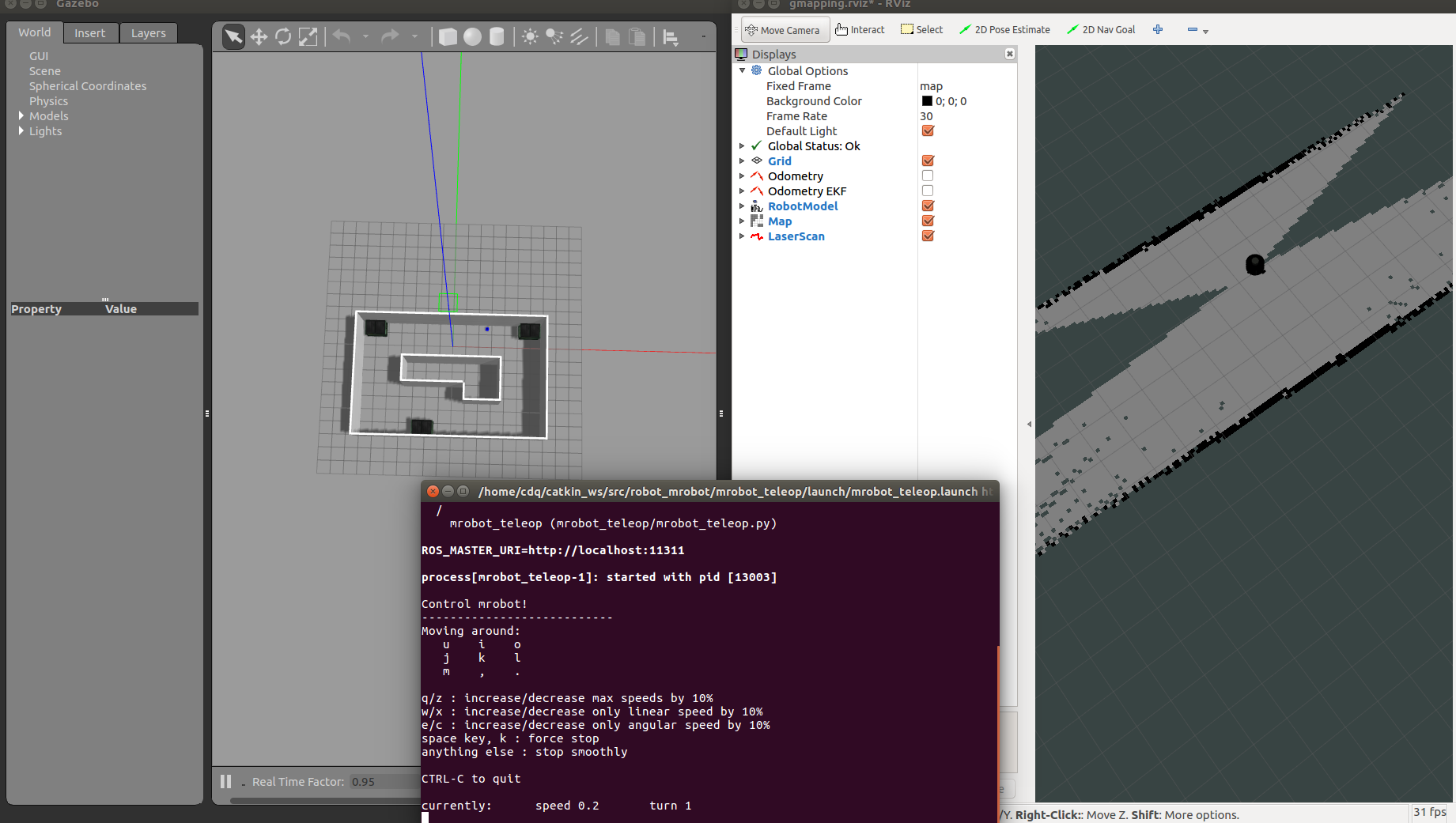
roslaunch mrobot_teleop mrobot_teleop.launch
-----------------------------------------
显示如下:
-END-