学习目标
- 理解如何用矩阵表示线性变换和仿射变换;
- 学习在坐标系中缩放,旋转和移动几何体;
- 学习利用矩阵的乘法合并几个变换矩阵;
- 学习如何在坐标系之间转换,并且表示为转换矩阵;斜体样式
- 学习如何利用DirectX Math库提供的方法构造转换矩阵。
1 线性转换
1.1 线性转换的定义
现在有方程
,当且仅当它满足下列属性的时候:
我们称它为一个线性变换。其中u和v是3D向量,k是标量。
例如定义
;τ(1, 2, 3) = (1, 4, 9);这个方程不是线性的,因为如果k = 2和u = (1, 2, 3):τ(ku) = τ(2, 4, 6) = (4, 16, 36),但是kτ(u) = 2(1, 4, 9) = (2, 8, 18)
所以不符合性质2,如果它是线性的,它应该符合:
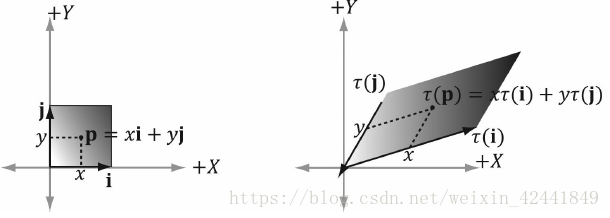
1.2 矩阵表示
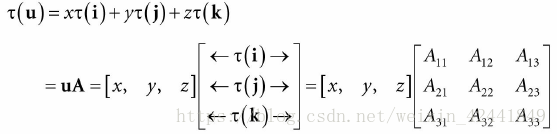
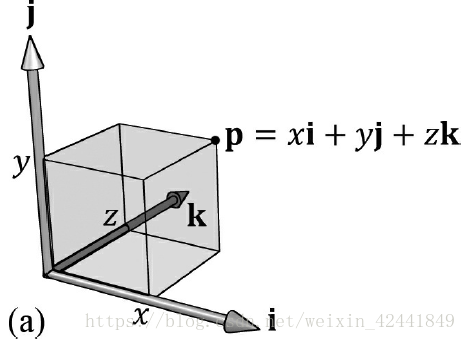
令u = (x, y, z)我们可以把它写成如下形式:
其中向量i = (1, 0, 0), j = (0, 1, 0), k = (0, 0, 1),是坐标系轴方向的单位向量,它们分别被称为
的标准基本向量,现在令τ为一个线性变换,它具备下面性质:
那么它可以被写成向量和矩阵相乘的形式:
其中

1.3 缩放
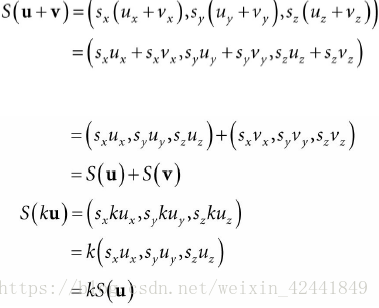
我们使用下面的公式来定义缩放:
它是物体在x轴方向缩放
倍,在y轴和z轴同理;我们现在要证明S 是一个线性转换:
为了得到矩阵表现,我们把S应用到每个标准基本向量中,然后把结果放到矩阵的每一行中:
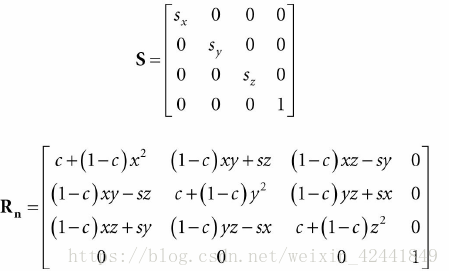
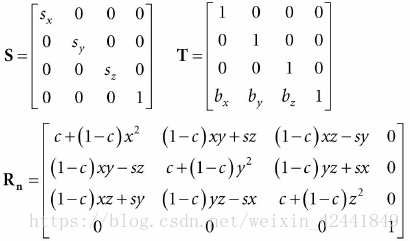
所以S的矩阵表现为:
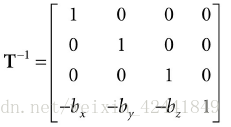
我们称这个矩阵为缩放矩阵,其逆矩阵为:

1.4 旋转
这一节我们描述将一个向量V关于轴n旋转θ角度;其中角度是当我们看向n轴时的顺时针方向,并且||n|| = 1:
首先将v分解为2部分:平行于n(
)和垂直于n(
);因为n是一个单位向量,所以
;值得注意的是
是平行于n的,它在旋转的过程中不变,所以我们只需要关注垂直那部分如果旋转,即旋转向量的结果就等于:
;
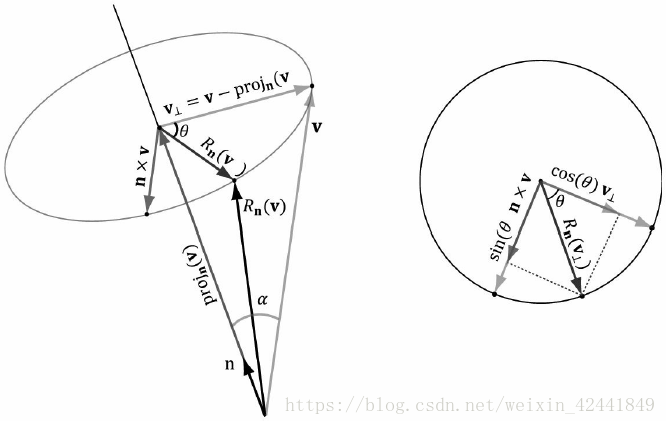
为了计算
,我们在旋转的平面上构建一个2D坐标系,首先使用
为第一个引用向量,为了得到第二个引用向量,我们使用叉积得到一个同时垂直于v和n的向量
,根据之前第一章练习14证明的公式(α是n和v之间的夹角):
所以所有引用向量的长度都是一样的,并且都是同一个园的半径,现在我们可以建立起他们之间的联系,得到公式如下:

进一步,可以得到旋转公式:
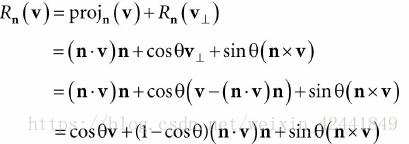
然后根据1.2中的公式,将上述线性变换转成矩阵(其中c为cosθ,s为sinθ):
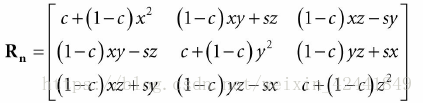
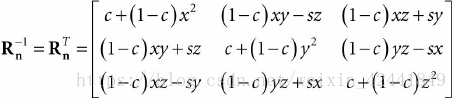
旋转矩阵有一个有趣的性质,它每一行的向量都是单位长度,并且互相垂直,所以它的行向量们是标准正交的;一个矩阵的行向量们标准正交的话,该矩阵称为标准正交矩阵。标准正交矩阵有一个很吸引人的性质:它的逆矩阵等于它的转置矩阵,所以:
通常来说,标准正交矩阵是非常值得使用的,因为它的逆矩阵可以很简单和高效的计算出来。
在特殊情况下,如果我们要围绕x,y,z轴旋转,我们可以得到下列矩阵:

2 仿射变换
2.1 齐次坐标系
在下一节中,我们将看到仿射变换其实是线性变换结合位移;位移不适用于向量,因为向量只表示方向和长度,其次坐标系中提供了一个计数方法可以点和向量的变化一致:
1、使用(x, y, z, 0)表示向量(w = 0可以保证向量在变化中不进行位移);
2、使用(x, y, z, 0)表示点。
2.2 矩阵表示的定义
一个仿射变换是一个线性变化加一个位移变化:
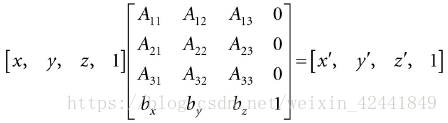
或者用矩阵表示:
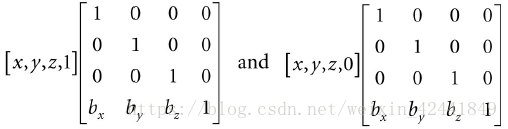
如果我们使用w = 1来扩展到齐次坐标系,那么可以使用更简洁的写法:
这个4 x 4矩阵就是仿射变换的矩阵表示,如果是针对向量,不想做位移操作,只需要把第四行w设置为0即可。

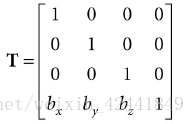
2.3 位移
位移矩阵:
位移矩阵的逆矩阵:
2.4 仿射矩阵的缩放和旋转
2.5 仿射矩阵变换的几何解释
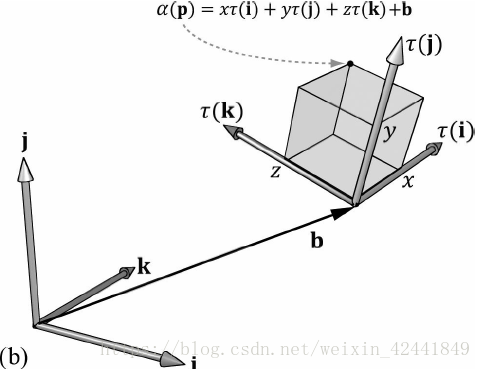
令τ是一个旋转变换,b是一个平移变换,那么这个变换就可以描述为一个仿射变换:

用其次坐标系(对于顶点w=1,对向量w=0)的矩阵表示为:
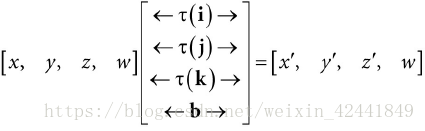
我们可以看到τ只是旋转了每一个标准分向量i,j和k;α(x, y, z) = xτ(i) + yτ(j) + zτ(k) + b,向量b只是平移了每一个顶点:
相同的思路也可以解释缩放变换:
3 变换的结合
假设S是一个缩放矩阵,R是一个旋转矩阵,T是一个平移矩阵;如果我们要对一个具有8个顶点的立方体做如何变换,最显而易见的方法是一步一步变换:

因为矩阵的乘法具有结合律,所以:
我们可以设C = SRT为一个同时封装了3个变换的矩阵。

4 坐标系变换
在3D计算机图形学中,我们需要使用到多个坐标系和坐标系之间的变换,对于顶点和向量的坐标系变幻是不同的。
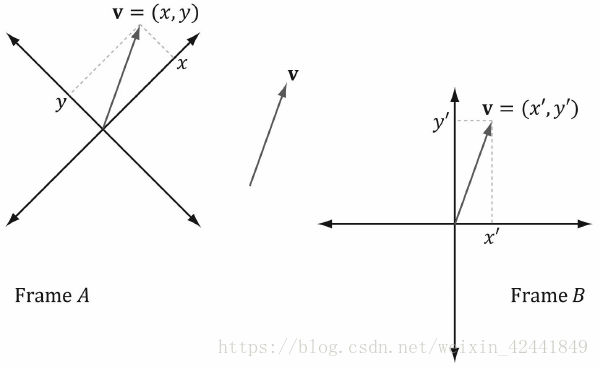
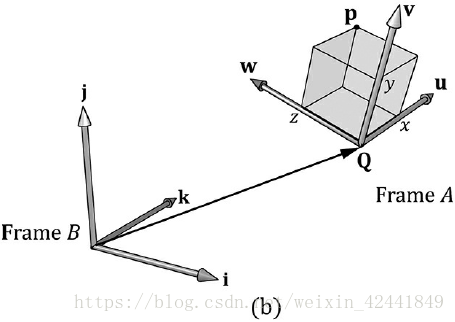
4.1 向量
下图中,有两个坐标系A和B,与一个向量P。
很明显 p = xu + yv,其中u和v是坐标系A中,x和y方向上的单位向量;那么
就可以解释为
;所以,如果我们知道
和
,那么我们就可以计算出
。
扩展到3D情况:

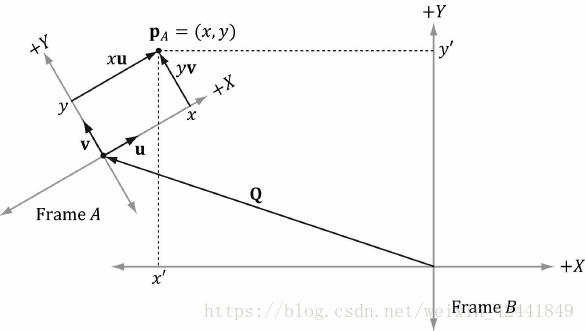
4.2 点
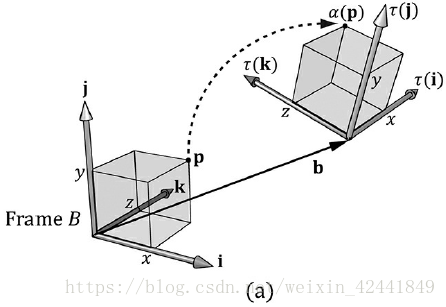
点的变换和向量有一点不同,点的位置很重要,如下图:
P点在坐标系A中可以表示为p = xu + yv + Q,那么在B坐标系中可以表示为
;所以,如果我们知道
、
和
,那么我们就可以计算出
。
扩展到3D的情况:
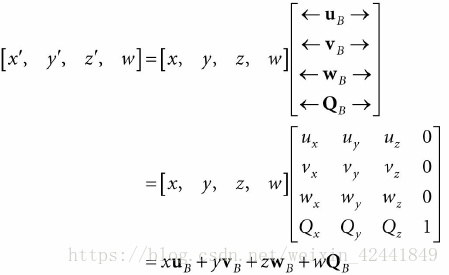
4.3 矩阵的表示
在齐次坐标系下:

那么矩阵表示如下:
我们称上述矩阵为一个坐标系变换矩阵,它将坐标系A变换到坐标系B。
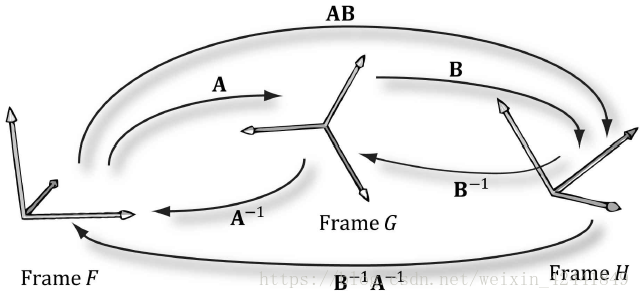
4.4 坐标系变换矩阵的结合律
假设我们有3个坐标你F,G,H;矩阵A可以从F变换到G,矩阵B可以从G变换到H;我们希望将向量p从F变换到H,最显而易见的方法就是一步一步变换:
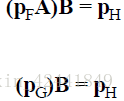
根据矩阵的乘法结合律:
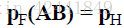
在这种情况下,矩阵C= AB可以将p直接从F坐标系变换到H坐标系。(再次提醒,矩阵的乘法不支持交换律)
4.5 坐标系变换矩阵的逆矩阵
假设我们有一个在B坐标系的向量p,我们有从坐标系A变换到B的矩阵M,如果将P变换到坐标系A,乘以M的逆矩阵就可以了:
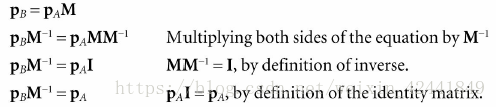
在本书中提到的坐标系变换映射都是可逆的,所以不需要担心是否存在逆矩阵。
5 变换矩阵 vs 坐标系变换矩阵
变换矩阵和坐标系变换矩阵是相同的,变化矩阵可以被解释为一个坐标系变换矩阵,反之亦然。
6 DIRECTX MATH 中的变换函数
在DIRECTX MATH中与变换函数相关的总结如下:
// Constructs a scaling matrix:
XMMATRIX XM_CALLCONV XMMatrixScaling(
float ScaleX,
float ScaleY,
float ScaleZ); // Scaling factors
// Constructs a scaling matrix from components in vector:
XMMATRIX XM_CALLCONV XMMatrixScalingFromVector(
FXMVECTOR Scale); // Scaling factors (sx, sy, sz)
// Constructs a x-axis rotation matrix Rx:
XMMATRIX XM_CALLCONV XMMatrixRotationX(
float Angle); // Clockwise angle θ to rotate
// Constructs a y-axis rotation matrix Ry:
XMMATRIX XM_CALLCONV XMMatrixRotationY(
float Angle); // Clockwise angle θ to rotate
// Constructs a z-axis rotation matrix Rz:
XMMATRIX XM_CALLCONV XMMatrixRotationZ(
float Angle); // Clockwise angle θ to rotate
// Constructs an arbitrary axis rotation matrix Rn:
XMMATRIX XM_CALLCONV XMMatrixRotationAxis(
FXMVECTOR Axis, // Axis n to rotate about
float Angle); // Clockwise angle θ to rotate
// Constructs a translation matrix:
XMMATRIX XM_CALLCONV XMMatrixTranslation(
float OffsetX,
float OffsetY,
float OffsetZ); // Translation factors
// Constructs a translation matrix from components in a vector:
XMMATRIX XM_CALLCONV XMMatrixTranslationFromVector(
FXMVECTOR Offset); // Translation factors (tx, ty, tz)
// Computes the vector-matrix product vM where vw = 1 for transforming points:
XMVECTOR XM_CALLCONV XMVector3TransformCoord(
FXMVECTOR V, // Input v
CXMMATRIX M); // Input M
// Computes the vector-matrix product vM where vw = 0 for transforming vectors:
XMVECTOR XM_CALLCONV XMVector3TransformNormal(
FXMVECTOR V, // Input v
CXMMATRIX M); // Input M
最后两个函数XMVector3TransformCoord和XMVector3TransformNormal,你不需要手动设置w = 0还是1,因为函数中会强制设置w的值。
7 本章总结
- 基础的变换矩阵:旋转,缩放和平移矩阵公式如下:
- 我们使用4x4矩阵表示变换;用1x4齐次坐标系来描述顶点和向量,其第四个值w,对于顶点为1,对于向量为0;
- 一个矩阵如果其4行向量都是单位向量并且相互垂直,则该矩阵为正交矩阵;正交矩阵的逆矩阵和它的转置矩阵相等,所以它的逆矩阵计算起来很简单和高效,所有旋转矩阵都是正交矩阵;
- 根据矩阵的乘法结合律,我们可以将多个变换矩阵合成为一个变化矩阵;
- 令
、
、
和
描述B坐标系下在A坐标系中的值,那么一个在A坐标系下的向量/顶点P,在B坐标系下的值就可以计算为:
- 假设有3个坐标系F,G和H,并且A矩阵从F变换到G,B矩阵从G变换到H;我们可以得到C = AB矩阵从F变换到H;
- 如果矩阵M可以从A坐标系变换到B坐标系,那么M的逆矩阵就可以从B坐标系变换到A坐标系;
- 一个有效的变换可以被解释为坐标系变换,反之亦然。

8 练习题
1、定义如下变换:τ(x, y, z) = (x + y, x – 3, z)。τ是否为线性变换,如果是,找出它的矩阵表示:
2、定义如下变换:τ(x, y, z) = (3x + 4z, 2x – z, x + y + z)。τ是否为线性变换,如果是,找出它的矩阵表示:
3、假设τ是一个线性变换,进一步假设τ(1, 0, 0) = (3, 1, 2), τ(0, 1, 0) = (2, -1, 3), 和 τ(0, 0, 1) = (4, 0, 2);找出τ(1, 1, 1):
4、创建一个缩放矩阵,x轴方向放大2倍,y轴方向放大-3倍,Z轴保持不变:
5、创建一个旋转矩阵,围绕(1, 1, 1)旋转30度:
6、创建一个平移矩阵,x轴方向移动4,y轴方向不变,z轴方向移动-9:
7、创建一个矩阵,先缩放(2, -3, 0),再平移(4, 0, -9):
8、创建一个矩阵,先旋转(0, 45度, 0),再平移(-2, 5, 1):
9、重做例子3.2,这次缩放(1.5, 0.75, 1),并且画图验证结果:
10、重做例子3.3,这次旋转(0,45度,0),并且画图验证结果:
11、重做例子3.4,这次平移(-5, -3, 4),并且画图验证结果:
12、证明 是线性变换,并且找到他的矩阵表示:
13、证明 是标准正交的,为了更多扩展练习,读者也可以证明基本旋转矩阵也是标准正交的:
14、证明M是标准正交的,有且仅有当 :
15、计算
这些计算移动顶点了吗,移动向量了吗?为什么没有移动向量在坐标系中的位置?
16、证明缩放矩阵的倒转就是它的逆矩阵,用矩阵的乘法表示为: ;同样的,证明平移矩阵:
17、假设我们有2个坐标系A和B,在A坐标系下的点p和力q;
令
创建从A坐标系映射到B坐标系的坐标系变换矩阵,并且计算在B坐标系下的p和q,并且画图验证结果:

18、