版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/HERO_CJN/article/details/82426372
首先规定一个坐标系,相对于该坐标系,点的位置可以用3维列向量表示;刚体的方位可用3×3的旋转矩阵来表示。而4×4的齐次变换矩阵则可将刚体位置和姿态(位姿)的描述统一起来,它具有以下优点:
(1) 它可描述刚体的位姿,描述坐标系的相对位姿(描述)。
(2) 它可表示点从一个坐标系的描述转换到另一坐标系的描述(映射)。
(3)它可表示刚体运动前、后位姿描述的变换(算子)。
1、位置描述——位置矢量
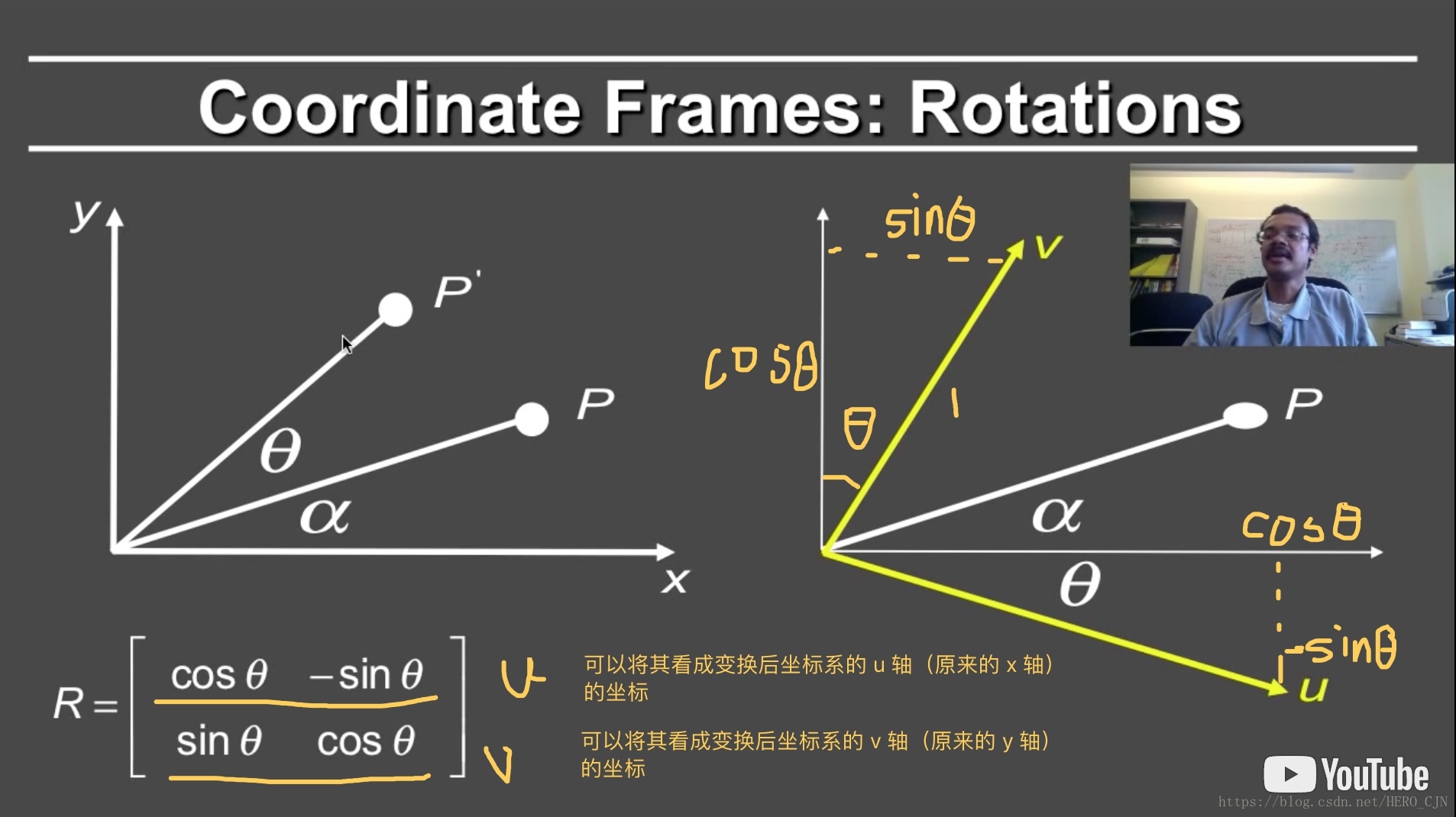
2、方位的描述——旋转矩阵
以后经常用到的旋转变换矩阵是绕X轴、绕Y轴或绕Z轴转一角度。它们是
向量a经过一次旋转R和一次平移t后,得到a':
3、非齐次表述
4、齐次表述
扫描二维码关注公众号,回复:
3140131 查看本文章
