1.根据一组点的坐标拟合空间平面,有两种方法:
第一种:如果在测量得到的数据中,x,y值都是确认没有误差的,而误差只是出现在z值上,则可以使用线性回归的方法,此方法最小二乘的目标是在z方向上的残差
Matlab 代码
% 随机生成一组(x,y,z),这些点的坐标离一个空间平面比较近
x0=1,L1=2;
y0=1,L2=2;
x=x0+rand(20,1)*L1;
y=y0+rand(20,1)*L2;
z=1+2*x+3*y;
scatter3(x,y,z,'filled')
hold on;
X = [ones(length(x),1) x y];
% 拟合,其实是线性回归,但可以用来拟合平面
% 输出为 b = [b(1) b(2) b(3)] 表示 z = b(1) + b(2)*x + b(3)*y 是拟合出来的平面的方程
[b,bint,r,rint,stats] = regress(z,X,95);
% 图形绘制
xfit = min(x):0.1:max(x);
yfit = min(y):0.1:max(y);
[XFIT,YFIT]= meshgrid (xfit,yfit);
ZFIT = b(1) + b(2) * XFIT + b(3) * YFIT;
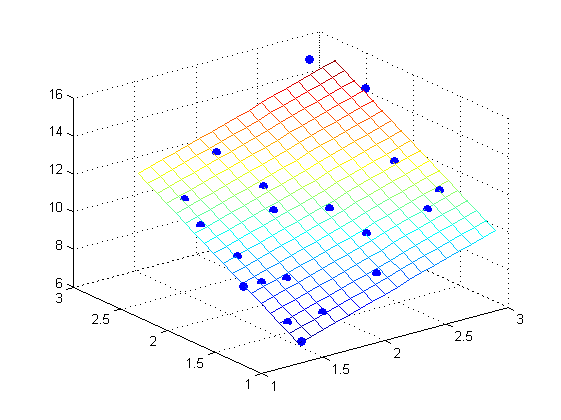
mesh(XFIT,YFIT,ZFIT);
输出结果如图1

第二中: 如果在测量得到的数据中,x,y,z都存在误差,则最小化的目标应该是测量点到平面距离的残差。
% 随机生成一组(x,y,z),这些点的坐标离一个空间平面比较近
x0=1,L1=2;
y0=1,L2=2;
x=x0+rand(20,1)*L1;
y=y0+rand(20,1)*L2;
z=1+2*x+3*y;
scatter3(x,y,z,'filled')
hold on;
planeData=[x,y,z];
% 协方差矩阵的SVD变换中,最小奇异值对应的奇异向量就是平面的方向
xyz0=mean(planeData,1);
centeredPlane=bsxfun(@minus,planeData,xyz0);
[U,S,V]=svd(centeredPlane);
a=V(1,3);
b=V(2,3);
c=V(3,3);
d=-dot([a b c],xyz0);
% 图形绘制
xfit = min(x):0.1:max(x);
yfit = min(y):0.1:max(y);
[XFIT,YFIT]= meshgrid (xfit,yfit);
ZFIT = -(d + a * XFIT + b * YFIT)/c;
mesh(XFIT,YFIT,ZFIT);
结果如图2
[参考网址](https://www.ilovematlab.cn/thread-220252-1-1.html) [转](https://blog.csdn.net/shenziheng1/article/details/51175383) [转](https://blog.csdn.net/eric_e/article/details/80983067?utm_source=blogxgwz6)