Part 1
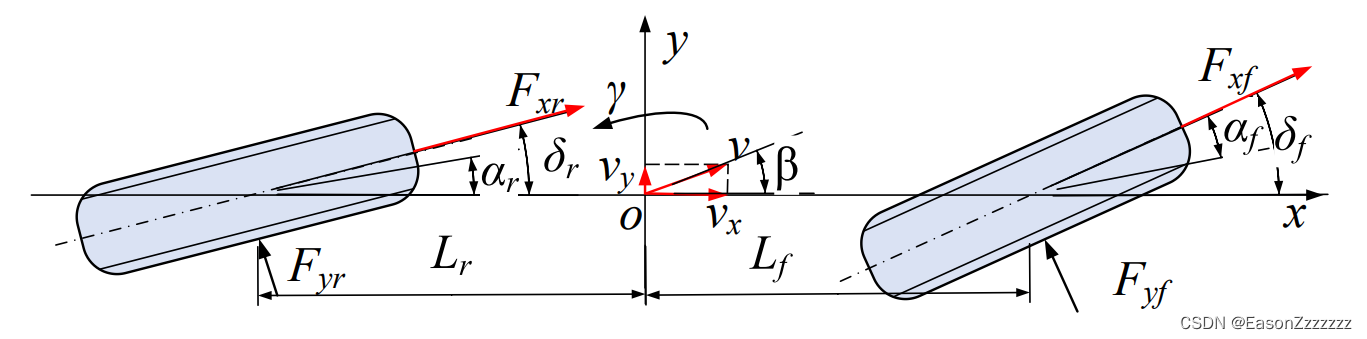
{ m ( v ˙ x − v y γ ) = F x f cos δ f + F x r cos δ r − F y f sin δ f − F y r sin δ r − F R m ( v ˙ y + v x γ ) = F x f sin δ f + F x r sin δ r + F y f cos δ f + F y r cos δ r I z γ ˙ = L f ( F x f sin δ f + F y f cos δ f ) − L r ( F x r sin δ r + F y r cos δ r ) (1) \begin{cases} m(\dot{v}_x-v_y\gamma)=F_{xf}\cos\delta_f+F_{xr}\cos\delta_r-F_{yf}\sin\delta_f-F_{yr}\sin\delta_r-F_R\\[2ex] m(\dot{v}_y+v_x\gamma)=F_{xf}\sin\delta_f+F_{xr}\sin\delta_r+F_{yf}\cos\delta_f+F_{yr}\cos\delta_r\\[2ex] I_z\dot{\gamma}=L_f(F_{xf}\sin\delta_f+F_{yf}\cos\delta_f)-L_r(F_{xr}\sin\delta_r+F_{yr}\cos\delta_r) \end{cases} \tag{1} ⎩ ⎨ ⎧m(v˙x−vyγ)=Fxfcosδf+Fxrcosδr−Fyfsinδf−Fyrsinδr−FRm(v˙y+vxγ)=Fxfsinδf+Fxrsinδr+Fyfcosδf+FyrcosδrIzγ˙=Lf(Fxfsinδf+Fyfcosδf)−Lr(Fxrsinδr+Fyrcosδr)(1)
整理可得:
{ v ˙ x = F x f cos δ f + F x r cos δ r − F y f sin δ f − F y r sin δ r − F R m + v y γ v ˙ y = F x f sin δ f + F x r sin δ r + F y f cos δ f + F y r cos δ r m − v x γ γ ˙ = L f ( F x f sin δ f + F y f cos δ f ) − L r ( F x r sin δ r + F y r cos δ r ) I z (2) \begin{cases} \dot{v}_x=\dfrac{F_{xf}\cos\delta_f+F_{xr}\cos\delta_r-F_{yf}\sin\delta_f-F_{yr}\sin\delta_r-F_R}{m}+v_y\gamma\\[2ex] \dot{v}_y=\dfrac{F_{xf}\sin\delta_f+F_{xr}\sin\delta_r+F_{yf}\cos\delta_f+F_{yr}\cos\delta_r}{m}-v_x\gamma\\[2ex] \dot{\gamma}=\dfrac{L_f(F_{xf}\sin\delta_f+F_{yf}\cos\delta_f)-L_r(F_{xr}\sin\delta_r+F_{yr}\cos\delta_r)}{I_z} \end{cases} \tag{2} ⎩
⎨
⎧v˙x=mFxfcosδf+Fxrcosδr−Fyfsinδf−Fyrsinδr−FR+vyγv˙y=mFxfsinδf+Fxrsinδr+Fyfcosδf+Fyrcosδr−vxγγ˙=IzLf(Fxfsinδf+Fyfcosδf)−Lr(Fxrsinδr+Fyrcosδr)(2)
Part 2
将重心速度转化到惯性坐标系中:
{ X ˙ = v cos ( β + φ ) Y ˙ = v sin ( β + φ ) \begin{cases} \dot{X}=v\cos(\beta+\varphi)\\[2ex] \dot{Y}=v\sin(\beta+\varphi) \end{cases} ⎩
⎨
⎧X˙=vcos(β+φ)Y˙=vsin(β+φ)
求导可得
{ X ¨ = − v sin ( β + φ ) ( β ˙ + φ ˙ ) + v ˙ cos ( β + φ ) Y ¨ = v cos ( β + φ ) ( β ˙ + φ ˙ ) + v ˙ sin ( β + φ ) \begin{cases} \ddot{X}=-v\sin(\beta+\varphi)(\dot{\beta}+\dot{\varphi})+\dot{v}\cos(\beta+\varphi)\\[2ex] \ddot{Y}=v\cos(\beta+\varphi)(\dot{\beta}+\dot{\varphi})+\dot{v}\sin(\beta+\varphi) \end{cases} ⎩
⎨
⎧X¨=−vsin(β+φ)(β˙+φ˙)+v˙cos(β+φ)Y¨=vcos(β+φ)(β˙+φ˙)+v˙sin(β+φ)
再把加速度转换到车辆重心坐标系中:
{ x ¨ = X ¨ cos φ + Y ¨ sin φ = − v ( β ˙ + γ ) sin β + v ˙ cos β y ¨ = − X ¨ sin φ + Y ¨ cos φ = v ( β ˙ + γ ) cos β + v ˙ sin β \begin{cases} \ddot{x}=\ddot{X}\cos\varphi+\ddot{Y}\sin\varphi=-v(\dot{\beta}+\gamma)\sin\beta+\dot{v}\cos\beta\\[2ex] \ddot{y}=-\ddot{X}\sin\varphi+\ddot{Y}\cos\varphi=v(\dot{\beta}+\gamma)\cos\beta+\dot{v}\sin\beta \end{cases} ⎩
⎨
⎧x¨=X¨cosφ+Y¨sinφ=−v(β˙+γ)sinβ+v˙cosβy¨=−X¨sinφ+Y¨cosφ=v(β˙+γ)cosβ+v˙sinβ
即
{ − v ( β ˙ + γ ) sin β + v ˙ cos β = F x f cos δ f + F x r cos δ r − F y f sin δ f − F y r sin δ r − F R m v ( β ˙ + γ ) cos β + v ˙ sin β = F x f sin δ f + F x r sin δ r + F y f cos δ f + F y r cos δ r m (6) \begin{cases} -v(\dot{\beta}+\gamma)\sin\beta+\dot{v}\cos\beta=\\[2ex]\qquad\dfrac{F_{xf}\cos\delta_f+F_{xr}\cos\delta_r-F_{yf}\sin\delta_f-F_{yr}\sin\delta_r-F_R}{m}\\[3ex] v(\dot{\beta}+\gamma)\cos\beta+\dot{v}\sin\beta=\\[2ex]\qquad\dfrac{F_{xf}\sin\delta_f+F_{xr}\sin\delta_r+F_{yf}\cos\delta_f+F_{yr}\cos\delta_r}{m} \end{cases}\tag{6} ⎩
⎨
⎧−v(β˙+γ)sinβ+v˙cosβ=mFxfcosδf+Fxrcosδr−Fyfsinδf−Fyrsinδr−FRv(β˙+γ)cosβ+v˙sinβ=mFxfsinδf+Fxrsinδr+Fyfcosδf+Fyrcosδr(6)
则
{ v ˙ = cos β m [ F x f cos δ f + F x r cos δ r − F y f sin δ f − F y r sin δ r − F R ] + sin β m [ F x f sin δ f + F x r sin δ r + F y f cos δ f + F y r cos δ r ] β ˙ = cos β m v [ F x f sin δ f + F x r sin δ r + F y f cos δ f + F y r cos δ r ] − sin β m v [ F x f cos δ f + F x r cos δ r − F y f sin δ f − F y r sin δ r − F R ] − γ \begin{cases} \dot{v}=\dfrac{\cos\beta}{m}\Big[F_{xf}\cos\delta_f+F_{xr}\cos\delta_r-F_{yf}\sin\delta_f-F_{yr}\sin\delta_r-F_R\Big]\\[2ex]\quad+\dfrac{\sin\beta}{m}\Big[F_{xf}\sin\delta_f+F_{xr}\sin\delta_r+F_{yf}\cos\delta_f+F_{yr}\cos\delta_r\Big]\\[3ex] \dot{\beta}=\dfrac{\cos\beta}{mv}\Big[F_{xf}\sin\delta_f+F_{xr}\sin\delta_r+F_{yf}\cos\delta_f+F_{yr}\cos\delta_r\Big]\\[2ex]\quad-\dfrac{\sin\beta}{mv}\Big[F_{xf}\cos\delta_f+F_{xr}\cos\delta_r-F_{yf}\sin\delta_f-F_{yr}\sin\delta_r-F_R\Big]-\gamma \end{cases} ⎩
⎨
⎧v˙=mcosβ[Fxfcosδf+Fxrcosδr−Fyfsinδf−Fyrsinδr−FR]+msinβ[Fxfsinδf+Fxrsinδr+Fyfcosδf+Fyrcosδr]β˙=mvcosβ[Fxfsinδf+Fxrsinδr+Fyfcosδf+Fyrcosδr]−mvsinβ[Fxfcosδf+Fxrcosδr−Fyfsinδf−Fyrsinδr−FR]−γ
因此以车身侧偏角、横摆角速度和车速为状态变量的车辆动力学方程的完整表达式如下:
{ v ˙ = cos β m [ F x f cos δ f + F x r cos δ r − F y f sin δ f − F y r sin δ r − F R ] + sin β m [ F x f sin δ f + F x r sin δ r + F y f cos δ f + F y r cos δ r ] β ˙ = cos β m v [ F x f sin δ f + F x r sin δ r + F y f cos δ f + F y r cos δ r ] − sin β m v [ F x f cos δ f + F x r cos δ r − F y f sin δ f − F y r sin δ r − F R ] − γ γ ˙ = L f ( F x f sin δ f + F y f cos δ f ) − L r ( F x r sin δ r + F y r cos δ r ) I z \begin{cases} \dot{v}=\dfrac{\cos\beta}{m}\Big[F_{xf}\cos\delta_f+F_{xr}\cos\delta_r-F_{yf}\sin\delta_f-F_{yr}\sin\delta_r-F_R\Big]\\[2ex]\quad+\dfrac{\sin\beta}{m}\Big[F_{xf}\sin\delta_f+F_{xr}\sin\delta_r+F_{yf}\cos\delta_f+F_{yr}\cos\delta_r\Big]\\[3ex] \dot{\beta}=\dfrac{\cos\beta}{mv}\Big[F_{xf}\sin\delta_f+F_{xr}\sin\delta_r+F_{yf}\cos\delta_f+F_{yr}\cos\delta_r\Big]\\[2ex]\quad-\dfrac{\sin\beta}{mv}\Big[F_{xf}\cos\delta_f+F_{xr}\cos\delta_r-F_{yf}\sin\delta_f-F_{yr}\sin\delta_r-F_R\Big]-\gamma\\[3ex] \dot{\gamma}=\dfrac{L_f(F_{xf}\sin\delta_f+F_{yf}\cos\delta_f)-L_r(F_{xr}\sin\delta_r+F_{yr}\cos\delta_r)}{I_z} \end{cases} ⎩
⎨
⎧v˙=mcosβ[Fxfcosδf+Fxrcosδr−Fyfsinδf−Fyrsinδr−FR]+msinβ[Fxfsinδf+Fxrsinδr+Fyfcosδf+Fyrcosδr]β˙=mvcosβ[Fxfsinδf+Fxrsinδr+Fyfcosδf+Fyrcosδr]−mvsinβ[Fxfcosδf+Fxrcosδr−Fyfsinδf−Fyrsinδr−FR]−γγ˙=IzLf(Fxfsinδf+Fyfcosδf)−Lr(Fxrsinδr+Fyrcosδr)
Part 3
忽略轮胎的纵向力,只有前轮转向,令 sin β = β , cos β = 1 \sin\beta=\beta,\cos\beta=1 sinβ=β,cosβ=1,且令
{ F y f = k f α f F y r = k r α r \begin{cases} F_{yf}=k_f\alpha_f\\[2ex] F_{yr}=k_r\alpha_r \end{cases} ⎩
⎨
⎧Fyf=kfαfFyr=krαr
可得
{ β ˙ = − k f + k r m v β + ( − k f L f − k r L r m v 2 − 1 ) γ + k f δ f m v γ ˙ = − k f L f − k r L r I z β − k f L f 2 + k r L r 2 I z v γ + k f L f I z δ f \begin{cases} \dot{\beta}=-\dfrac{k_f+k_r}{mv}\beta+\Big(-\dfrac{k_fL_f-k_rL_r}{mv^2}-1\Big)\gamma+\dfrac{k_f\delta_f}{mv}\\[3ex] \dot{\gamma}=-\dfrac{k_fL_f-k_rL_r}{I_z}\beta-\dfrac{k_fL_f^2+k_rL_r^2}{I_zv}\gamma+\dfrac{k_fL_f}{I_z}\delta_f \end{cases} ⎩
⎨
⎧β˙=−mvkf+krβ+(−mv2kfLf−krLr−1)γ+mvkfδfγ˙=−IzkfLf−krLrβ−IzvkfLf2+krLr2γ+IzkfLfδf
即
[ β ˙ γ ˙ ] = [ − k f + k r m v − k f L f − k r L r m v 2 − 1 − k f L f − k r L r I z − k f L f 2 + k r L r 2 I z v ] ⋅ [ β γ ] + [ k f m v k f L f I z ] δ f \left[ \begin{matrix} \dot{\beta} \\[2ex] \dot{\gamma} \\ \end{matrix} \right]= \left[ \begin{matrix} -\dfrac{k_f+k_r}{mv} & -\dfrac{k_fL_f-k_rL_r}{mv^2}-1\\[2ex] -\dfrac{k_fL_f-k_rL_r}{I_z} & -\dfrac{k_fL_f^2+k_rL_r^2}{I_zv} \\ \end{matrix} \right]\cdot \left[ \begin{matrix} {\beta} \\[2ex] {\gamma} \\ \end{matrix} \right]+ \left[ \begin{matrix} \dfrac{k_f}{mv} \\[2ex] \dfrac{k_fL_f}{I_z} \\ \end{matrix} \right]\delta_f
β˙γ˙
=
−mvkf+kr−IzkfLf−krLr−mv2kfLf−krLr−1−IzvkfLf2+krLr2
⋅[βγ]+
mvkfIzkfLf
δf
即
x ˙ = A x + B \dot{x}=Ax+B x˙=Ax+B
Part 4
[ F y f F y r ] = [ k f 0 0 k r ] [ α f α r ] = [ k f 0 0 k r ] [ 1 L f v 1 − L r v ] [ β γ ] − [ δ f 0 ] = [ k f k f L f v k r − k r L r v ] [ β γ ] + [ − δ f 0 ] \left[ \begin{matrix} F_{yf} \\[2ex] F_{yr} \\ \end{matrix} \right]= \left[ \begin{matrix} k_f & 0 \\[2ex] 0 & k_r \\ \end{matrix} \right] \left[ \begin{matrix} \alpha_f \\[2ex] \alpha_r \\ \end{matrix} \right]= \left[ \begin{matrix} k_f & 0 \\[2ex] 0 & k_r \\ \end{matrix} \right] \left[ \begin{matrix} 1 & \dfrac{L_f}{v} \\[2ex] 1 & -\dfrac{L_r}{v} \\ \end{matrix} \right] \left[ \begin{matrix} \beta \\[2ex] \gamma \\ \end{matrix} \right]- \left[ \begin{matrix} \delta_f \\[2ex] 0 \\ \end{matrix} \right]= \left[ \begin{matrix} k_f & \dfrac{k_fL_f}{v}\\[2ex] k_r & -\dfrac{k_rL_r}{v} \\ \end{matrix} \right]\left[ \begin{matrix} \beta \\[2ex] \gamma \\ \end{matrix} \right]+ \left[ \begin{matrix} -\delta_f \\[2ex] 0 \\ \end{matrix} \right] [FyfFyr]=[kf00kr][αfαr]=[kf00kr] 11vLf−vLr [βγ]−[δf0]= kfkrvkfLf−vkrLr [βγ]+[−δf0]
即
z = C x + D z=Cx+D z=Cx+D
令
{ x = C − 1 ( z − D ) x ˙ = C − 1 z ˙ \begin{cases} x=C^{-1}(z-D)\\[2ex] \dot{x}=C^{-1}\dot{z} \end{cases} ⎩
⎨
⎧x=C−1(z−D)x˙=C−1z˙
有
C − 1 z ˙ = A C − 1 ( z − D ) + B z ˙ = C A C − 1 z + C B − C A C − 1 D C^{-1}\dot{z}=AC^{-1}(z-D)+B\\ \dot{z}=CAC^{-1}z+CB-CAC^{-1}D C−1z˙=AC−1(z−D)+Bz˙=CAC−1z+CB−CAC−1D
即
[ F y f ˙ F y r ˙ ] = H [ F y f F y r ] + G \left[ \begin{matrix} \dot{F_{yf}} \\[2ex] \dot{F_{yr}} \\ \end{matrix} \right]= H\left[ \begin{matrix} F_{yf} \\[2ex] F_{yr} \\ \end{matrix} \right]+G
Fyf˙Fyr˙
=H[FyfFyr]+G
其中 H = C A C − 1 , G = C B − C A C − 1 D H=CAC^{-1},G=CB-CAC^{-1}D H=CAC−1,G=CB−CAC−1D