无人驾驶车辆的操作稳定性需要综合考虑车辆横摆稳定性和侧倾稳定性。因此建立横摆、侧滑和侧倾综合等效约束的车辆动力学模型。
一、动力学模型推导
车辆动力学模型在运动学模型的基础上进行外延,将车速进行提高,结合轮胎纯侧偏特性,忽略横纵向力的耦合关系,由此得到的车辆的动力学模型。
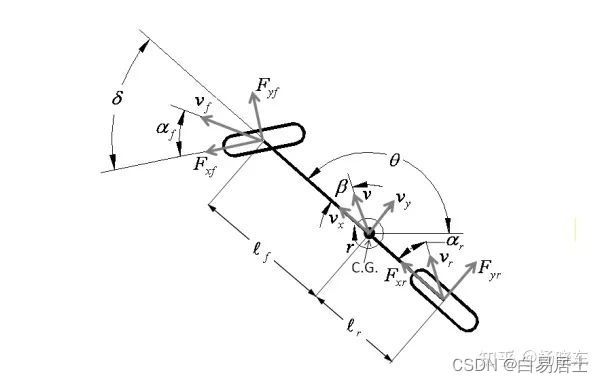
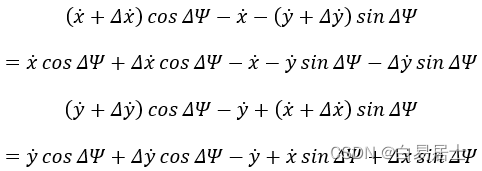
在车辆坐标系下,质心速度v在x轴和y轴上的分量为图片和图片,由于车辆行驶时,不仅在做平动,还在绕某一瞬轴做转动,在图片时刻,车辆坐标系中质心速度v的大小和方向相对于t时刻均发生变化,此时车辆坐标系相对于大地坐标系的位置和方向也都发生了变化。在图片时刻相对于t时刻的车辆坐标系下,图片时间内图片和图片的变化量分别为:
考虑图片很小,做出如下假设(15°以内,根据实际计算可以放大):
同时忽略二阶微量,图片时间内图片和图片的变化量分别为:

因此,在车辆坐标系下,沿x轴和y轴速度的变化率即沿x轴和y轴的加速度为:
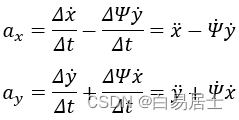
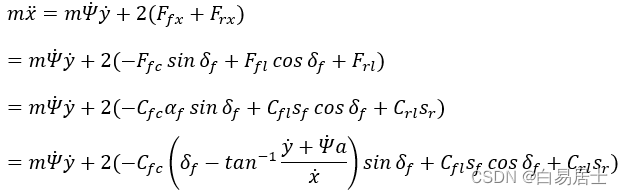
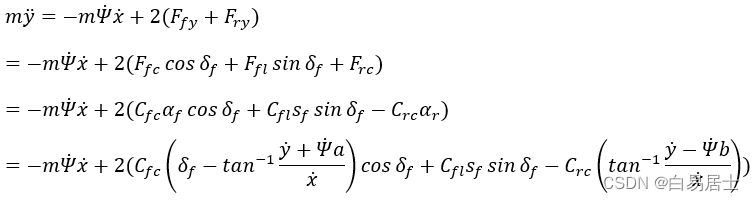
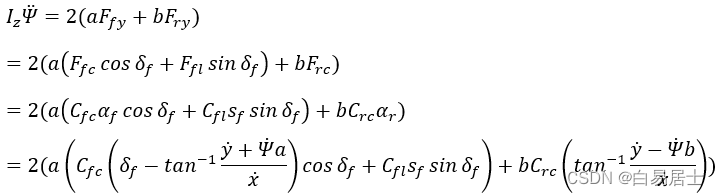
其中图片和图片是一个惯性加速度,也称为科里奥利加速度,对应的力也称为科里奥利力。因此,在车辆坐标系下,沿x轴、y轴的平衡方程以及绕z轴转动的平衡方程为:
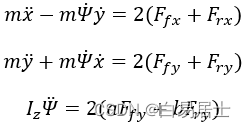
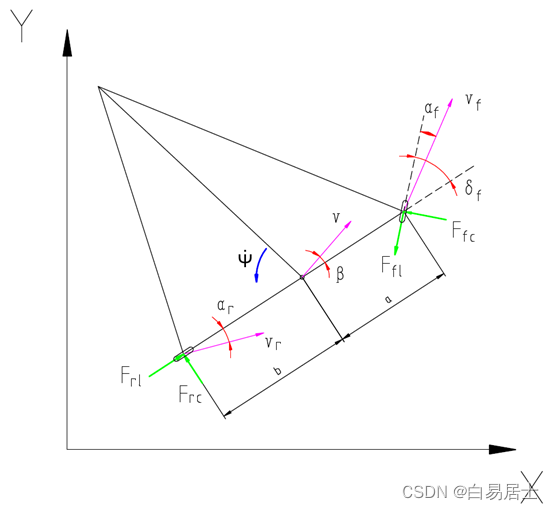
将前、后轮沿x轴和y轴的力分解为前、后轮轮胎的侧向力和纵向力,得:
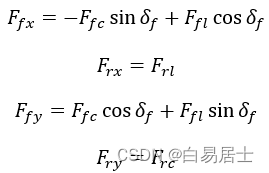
前轮侧向力在x轴上的分量始终为负,因此在前增加负号纠正车轮转角正负的影响,上式参数均为矢量。
轮胎的侧向力和纵向力与轮胎的侧偏/纵向刚度、侧偏角/滑移率、地面摩擦系数、垂直载荷有关,在确定的车辆和地面,可以认为侧向力和纵向力有如下关系:

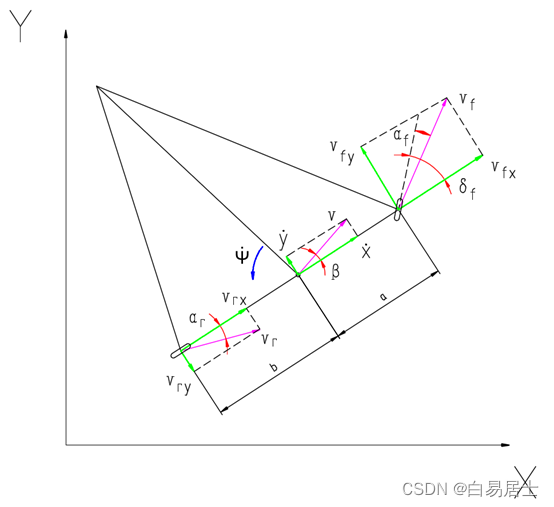
前、后轮侧偏角可以根据速度得正切值求得。由于前轮为转向轮,实际上侧偏角的大小为前轮转角和速度正切值的差值:
由于车辆为一个整体,则x轴方向上各点的速度相同。在y轴方向上,根据车辆横摆角速度的方向,前、后轮相对质心处的y轴方向的速度为角速度与距质心距离的乘积,相对瞬心的y轴方向的速度则再加上质心相对瞬心的y轴方向的速度:
将上式带入侧偏角公式,得前、后轮侧偏角为:
结合上述关系式可以得到如下关系:
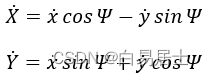
在大地坐标系下,车辆沿X轴、Y轴方向的速度为:
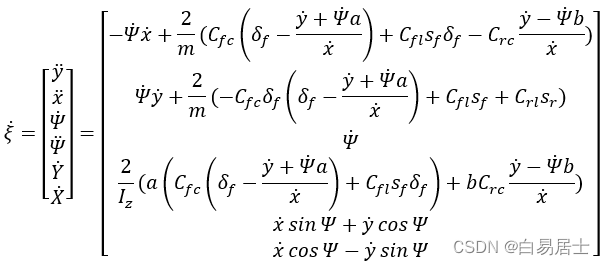
令控制量、状态量分别为:

可以得到:
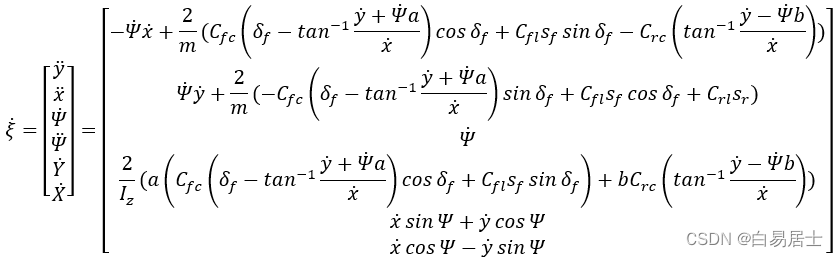
至此车辆动力学模型推导完毕。
二、小角度简化
在小角度下,上式可以简化为:
三、动力学模型验证
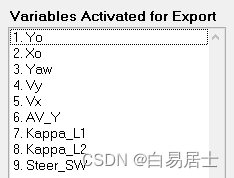
由Carsim输出车辆横纵向速度及横摆角速度至simulink模块,验证其准确性。
Carsim输出量如下:
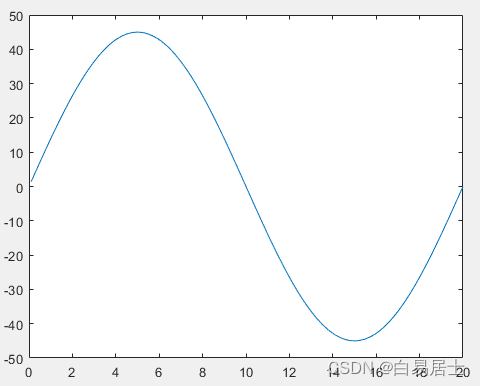
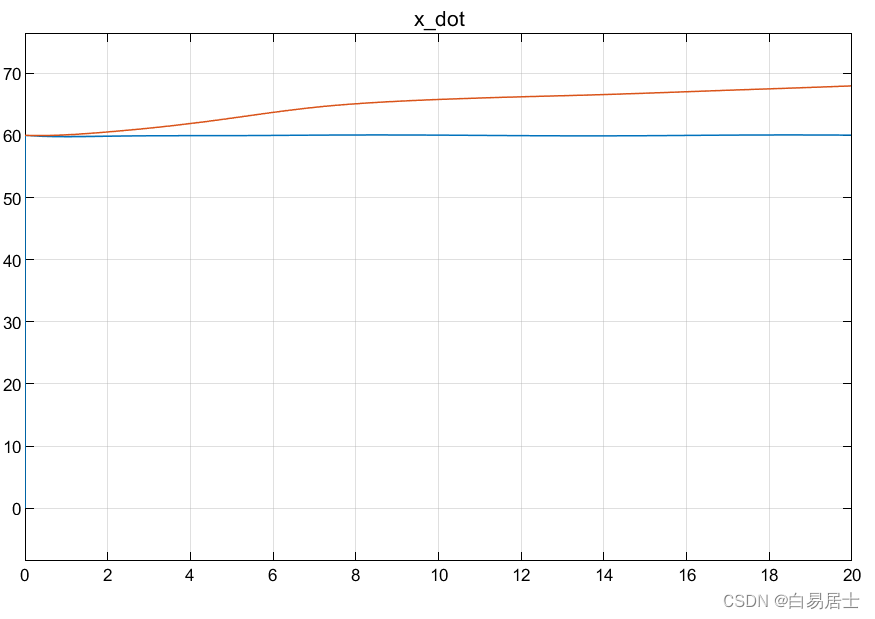
纵向车速保持60km/h,转角输入如下:
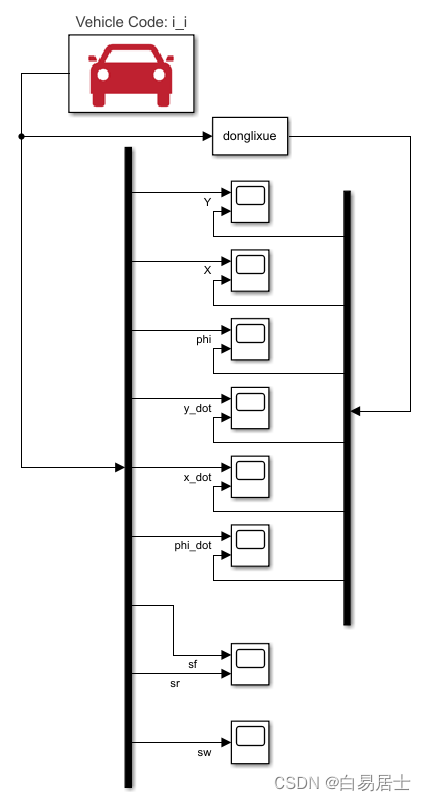
simulink模型如下:
s-function代码如下:
function sys=mdlUpdate(t,x,u)
%% 车辆参数
tt=0.05; % 采样时间
cfc=66900; % 此处轮胎刚度借用《无人驾驶车辆模型预测控制》中的刚度参数
cfl=66900;
crc=62700;
crl=62700;
sf=u(7); % 前后轮滑移率
sr=u(8);
a=1.015; % 前轮到质心的距离
b=1.895; % 后轮到质心的距离
iz=1536.7; % 转动惯量
m=1270; % 质量
sw=u(9)/18*pi/180;
%% 动力学模型
Y=x(1);
X=x(2);
phi=x(3);
y_dot=u(4)/3.6;
x_dot=u(5)/3.6;
phi_dot=u(6);
Y_dot=x_dot*sin(phi*pi/180)+y_dot*cos(phi*pi/180);
X_dot=x_dot*cos(phi*pi/180)-y_dot*sin(phi*pi/180);
x(1)=Y+Y_dot*tt;
x(2)=X+X_dot*tt;
x(3)=phi+phi_dot*tt;
y_dot=x(4)/3.6;
x_dot=x(5)/3.6;
phi_dot=x(6)*pi/180;
dy_dot=-x_dot*phi_dot+2/m*(cfc*(sw-(y_dot+a*phi_dot)/x_dot)+cfl*sf*sw-crc*(y_dot-b*phi_dot)/x_dot);
dx_dot=y_dot*phi_dot+2/m*(-cfc*sw*(sw-(y_dot+a*phi_dot)/x_dot)+cfl*sf+crl*sr);
dphi_dot=2/iz*(a*cfc*(sw-(y_dot+a*phi_dot)/x_dot)+a*cfl*sf*sw+b*crc*(y_dot-b*phi_dot)/x_dot);
x(4)=x(4)+dy_dot*tt*3.6;
x(5)=x(5)+dx_dot*tt*3.6;
x(6)=x(6)+dphi_dot*tt*180/pi;
sys = x;
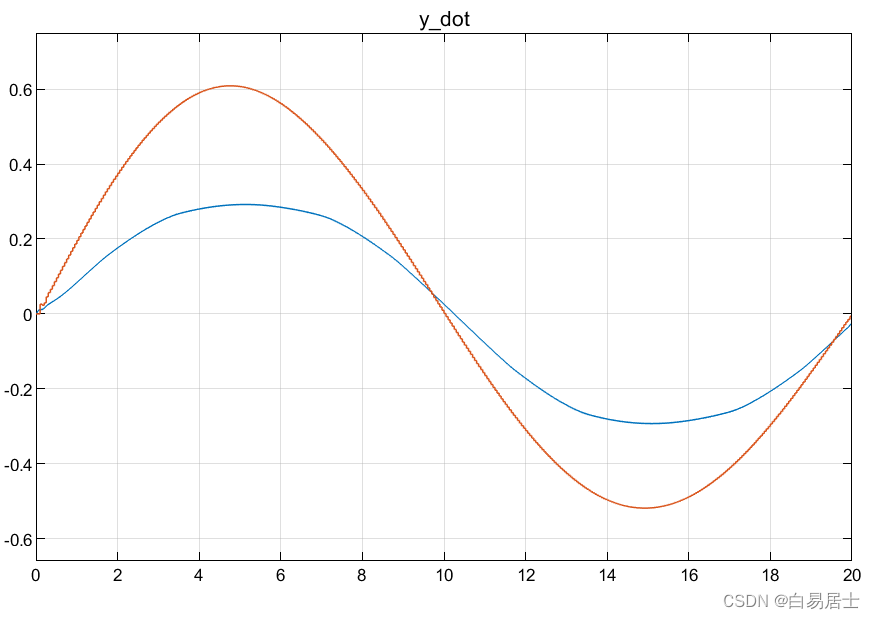
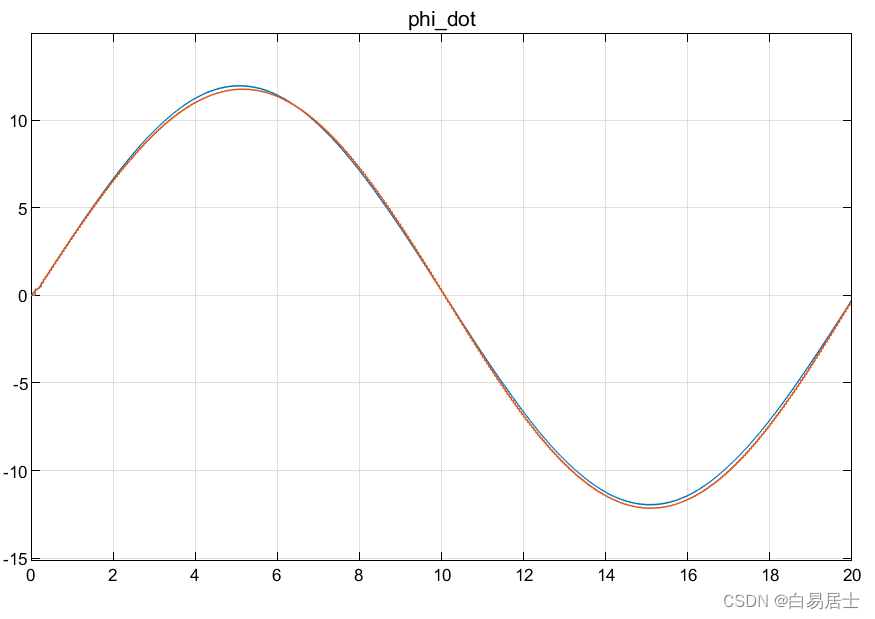
仿真结果如下(蓝线为carsim输出值,红线为计算值):
四、线性化
与运动学模型线性化类似,考虑系统某个工作点为图片,图片为施加图片控制后得到的系统状态量,存在如下一阶线性微分方程:
在点图片处进行泰勒展开,忽略二阶及以上高阶项,得:
令:

可得:
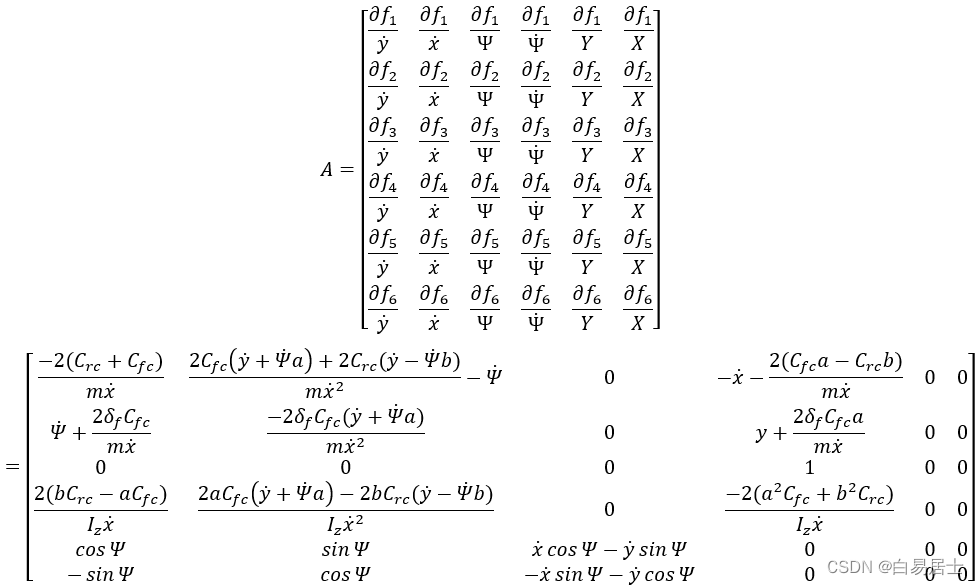
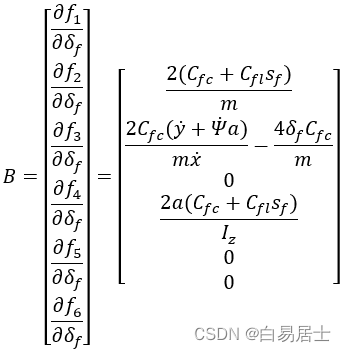
其中:
五、离散化
六、延伸
牵连运动、科里奥利力、科里奥利加速度、轮胎横向模型、轮胎纵向模型、魔术公式。
七、个人理解
从仿真结果的结果来看,动力学模型对于横纵向速度的计算并不是很准确,从carsim的动画来看,整车的姿态变化比较小,考虑从轮胎刚度及滑移率上进行修正尝试。另外在大角度转弯下,动画中车身的姿态的变化已经较为明显,此时上述模型已经不在适用,因此,简化后的模型其实对前轮转角的大小及变化率要求比较严格。
在轮胎刚度的计算时,从carsim中轮胎曲线用魔术公式反推轮胎刚度,偏差比较大,因此直接借用了书中的轮胎尺寸及刚度,后续计划轮胎单独进行展开。之后的更新计划是在上述模型的基础上,进行LQR和MPC算法的应用,之后是EPS系统的“小插曲”,随后就是LKA等的展开。