车辆十四自由度动力学模型综合了车辆的操纵模型和平顺模型,自由度包括四个车轮的垂向跳动和四个车轮绕旋转轴线的滚动,车体的六个自由度,包括在车体坐标系内的x,y,z的平动和绕x、y、z轴的翻滚、俯仰和横摆运动。
关于车辆动力学建模目前有很多仿真软件都包含相关的模块,例如CarSim,AMESim,ADAMS,MATLAB/Simulink等;不同的仿真软件都有各自的优缺点,例如最常见的CarSim专门用来分析车辆的动力学性能,并通过仿真结果输出3D动画演示,具有很强的可视化。AMESim软件中的Vehicle Dynamic模块系统的包含了不同自由度的汽车动力学仿真模型,其中的帮助文档对建模具有一定借鉴意义;
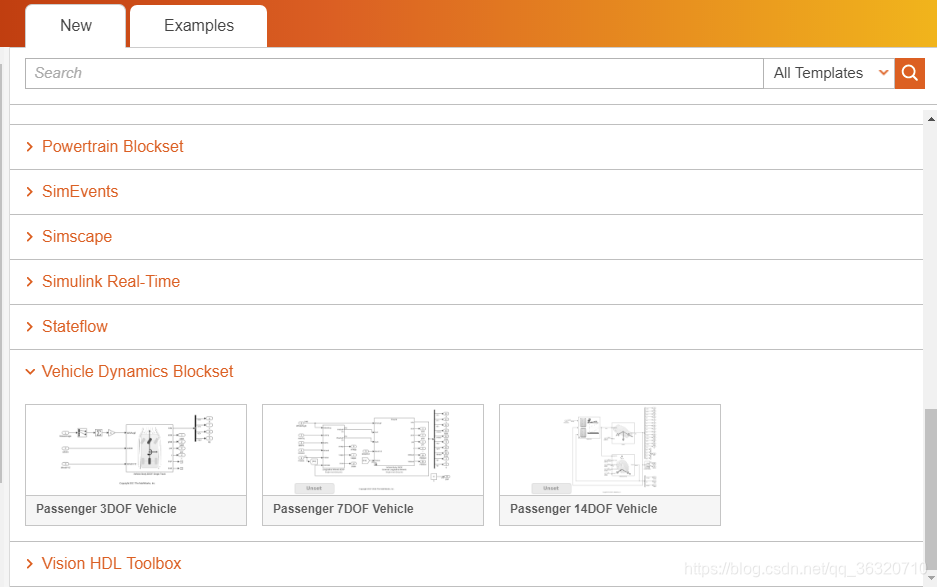
但是CarSim,AMESim这一类软件内部的计算方法和模型机理都是商业化的,即用户无法看到内部的建模细节。对于想要彻底精细的了解车辆动力学建模的同学,建议使用MATLAB/Simulink软件,其提供的Vehicle Dynamics Blockset例子库中包含了3DOF、7DOF和14DOF的模型,对研究车辆的动态性能带来了很大的方便,每一个例子中都详细的搭建了车辆动力学模型,可以直接与自己搭建的模型集成起来,非常方便,并有丰富的帮助文档。
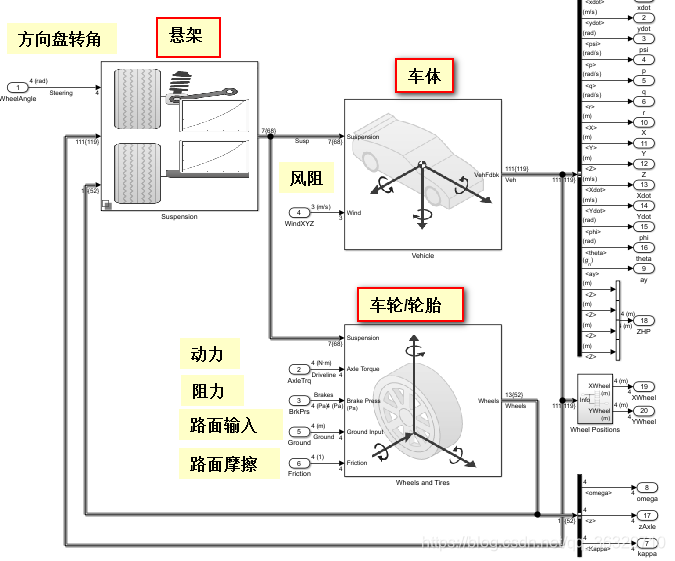
在Simulink下打开提供的十四自由度动力学模型如下所示,其中主要包括三部分,分别介绍悬架、车体和车轮。下边分别对该三部分进行介绍说明。为了简化说明,以下部分不提供具体的公式推导,而是仅提供关键和建模时易错和混淆的地方,详细公式和推导可以参照文末给出的参考资料。
坐标系说明
十四自由度车辆动力学模型主要包含四个坐标系,之所以建立不同的坐标系,由于在不同部件的坐标系下对不同部件进行动力学计算能够大大降低统一换算在惯性坐标系中计算的复杂程度。而通过不同坐标系下的动力学计算,再根据坐标变换等方法便可以得到在期望坐标系下的变量。不同坐标系和相关术语请参考文末提供的行业标准和术语参考。
惯性坐标系
车体坐标系
车轮坐标系(轮轴坐标系)
轮胎坐标系
坐标系之间的转换
从惯性坐标系到车体坐标系按照Z-Y-X的变换原则,采用依次绕z、y、x相应的角度,即psi、theta、phi,即可从惯性坐标系变换到车体坐标系。其中psi是指车体坐标系从与惯性系重合的位置开始绕车体坐标系Z轴转过的角度,theta是指在新位置又绕车体Y轴转过的角度,而phi是指在前两次转动之后车体在新位置再绕车体X轴转过的角度。
R0表示为:
同样,坐标系R0绕Y轴旋转角度 到坐标系R1,则R1中的某点 在坐标系R0表示为:
同样,坐标系R0绕Z轴旋转角度 到坐标系R1,则R1中的某点 在坐标系R0表示为:
因此,从惯性坐标系转化到车体坐标系,需要惯性坐标系依次绕Z轴旋转 ,然后在新位置又绕Y轴转过的角度 ,前两次转动之后车体在新位置再绕X轴转过的角度 即可得到车体坐标系R1,方向余弦矩阵如下(从车体坐标系转换到惯性坐标系), 代表正弦, 代表余弦
车体模型
十四自由度车辆动力学模型中包含的车体模型为六个自由度,通过把车体简化为刚体,进而在空间中体现出六个自由度。根据SAE给出的标准,车体坐标系有两种,都遵循右手坐标系,差别仅在于Z轴方向上的不同,如下图所示。
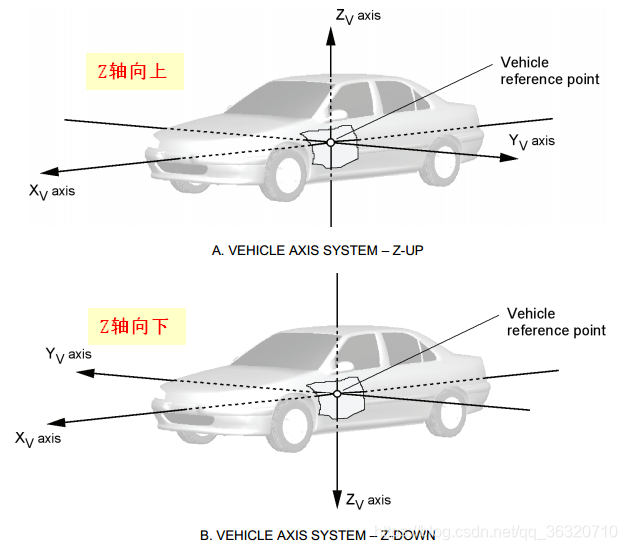
关于车体坐标系需要说明的是,它与惯性坐标系不同,车体坐标系是固连到车体质心处,而且Z轴是垂直于 XY平面,而不是铅锤于地平面。例如车体发生俯仰时车体坐标系Z轴与惯性坐标系的Z轴并不在一个方向上。
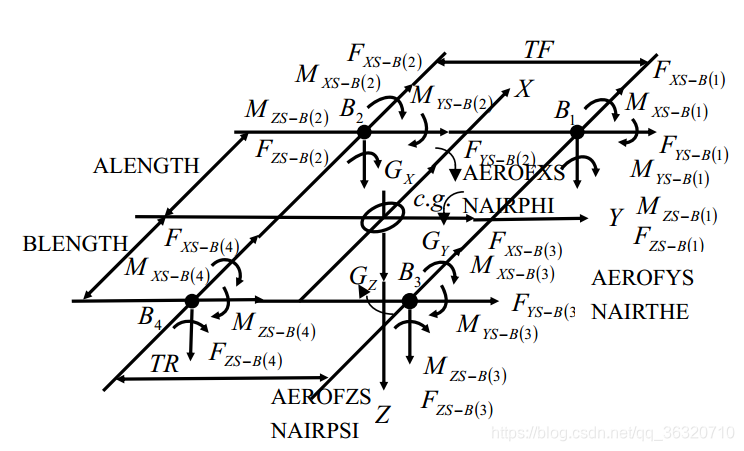
车体模型输入量为四个悬架各自对车体的作用力(力矩)和风阻,这里先不考虑空气作用力,每个悬架对车体分别施加沿着车体坐标系X,Y,Z轴三个方向上的作用力和绕车体坐标系X、Y、Z轴三个方向上的力矩。在车体坐标系下,车体除了受到上述的作用力,还受到车体本身的重力,通过将重力分别投影到车体坐标系的三个轴上,受力分析如下图所示。
根据车体的质量和绕各个轴的转动惯量,根据达朗贝尔原理,即可展开列出关于质心处的沿着X、Y、Z三个轴的平动加速度和转动角加速度的动力学公式。进而可以得出加速度和角加速度,然后积分得到速度和角速度,换算到惯性坐标系后再积分得到车体在惯性坐标系下运动的位移X纵向位移、Y侧向位移、Z垂向位移和位姿Z轴的横摆yaw角度psi,绕Y轴的俯仰pitch角度theta,绕X轴的侧倾roll角度phi。主要变量如下表所示。
| 符号 | 意义 | 符号 | 意义 |
|---|---|---|---|
| 纵向位置X | 车体质心在惯性坐标系X坐标 | 侧倾角phi | 车体绕惯性坐标系X轴欧拉角 |
| 侧向位置Y | 车体质心在惯性坐标系Y坐标 | 俯仰角theta | 车体绕惯性坐标系Y轴欧拉角 |
| 垂向位置Z | 车体质心在惯性坐标系Z坐标 | 横摆角psi | 车体绕惯性坐标系Z轴欧拉角 |
| 纵向速度u | 车体质心沿车体坐标系X方向的速度 | 侧倾角速度p | 车体绕车体坐标系X轴角速度 |
| 侧向速度v | 车体质心沿车体坐标系Y方向的速度 | 俯仰加速度q | 车体绕车体坐标系Y轴角速度 |
| 垂向速度w | 车体质心沿车体坐标系Z方向的速度 | 横摆角速度r | 车体绕车体坐标系Z轴角速度 |
下式中左侧为车体坐标系下车体的加速度,即根据牛顿第二定律a=F/m计算得到,该式描述了加速度与车速沿车体坐标系的变化量之间的关系。注意,这里的加速度与车速变化量不是一个含义。
R ⃗ ¨ s = [ u ˙ − r v + q w v ˙ + r u − p w w ˙ − q u + p v ] \ddot{\vec{R}}_{s}=\left[\begin{array}{c}\dot{u}-r v+q w \\ \dot{v}+r u-p w \\ \dot{w}-q u+p v\end{array}\right] R¨s=⎣⎡u˙−rv+qwv˙+ru−pww˙−qu+pv⎦⎤
悬架模型
车轮模型
轮胎模型
总结
关于不同自由度所建立的车辆动力学模型,包括二自由度(侧向和横摆两个自由度的),三自由度(在二自由度的基础上加上一个纵向自由度),七自由度(车身的纵向、侧向和横摆三个自由度加上四个车轮的四个旋转自由度)、八自由度(七自由度的基础上加上车身侧倾自由度),以及本文中讲述的十四自由度,还有十九、二十七自由度(CarSim中用的就是)的动力学模型。对于不同自由度下的汽车动力学模型都有其适应的研究范围,不必一味追求高自由度模型,而是要综合考虑适用范围和研究深度等,关于不同自由度的车辆模型适用范围和特点请参考文献2-面向性能的汽车运动动力学模型回顾。
所用到的行业标准和术语:
所参考的资料:
- 2007_ASCL汽车运动动力学实时仿真模型理论手册.
- 面向性能的汽车运动动力学模型回顾
- 敬婕. 面向品质动力学的路面激励实时模型建模研究[D].吉林大学, 2016
- 逄淑一. 面向主观评价的汽车动力学建模研究[D]. 吉林大学, 2011.魏天将
- 二十二自由度车辆动力学建模与仿真分析研究[D].湖南大学, 2015
- 十四自由度车辆动力学模型仿真分析_闫瑞雷[J]
- 十七自由度车辆动力学仿真模型的研究_陈鹏飞[J]