IMU-1.模拟型的IMU
2.数字型的IMU
3.IMU的设计小结
=======================
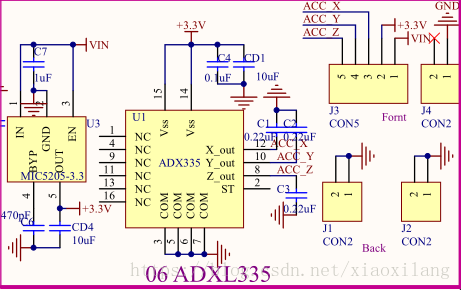
1.采集ic和电路,可以参考datasheet
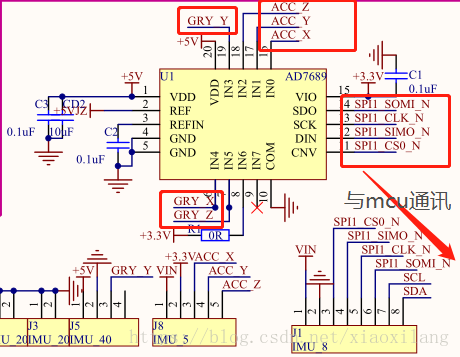
2.spi-〉MCU通讯的驱动编写,采集管脚IN0~IN7
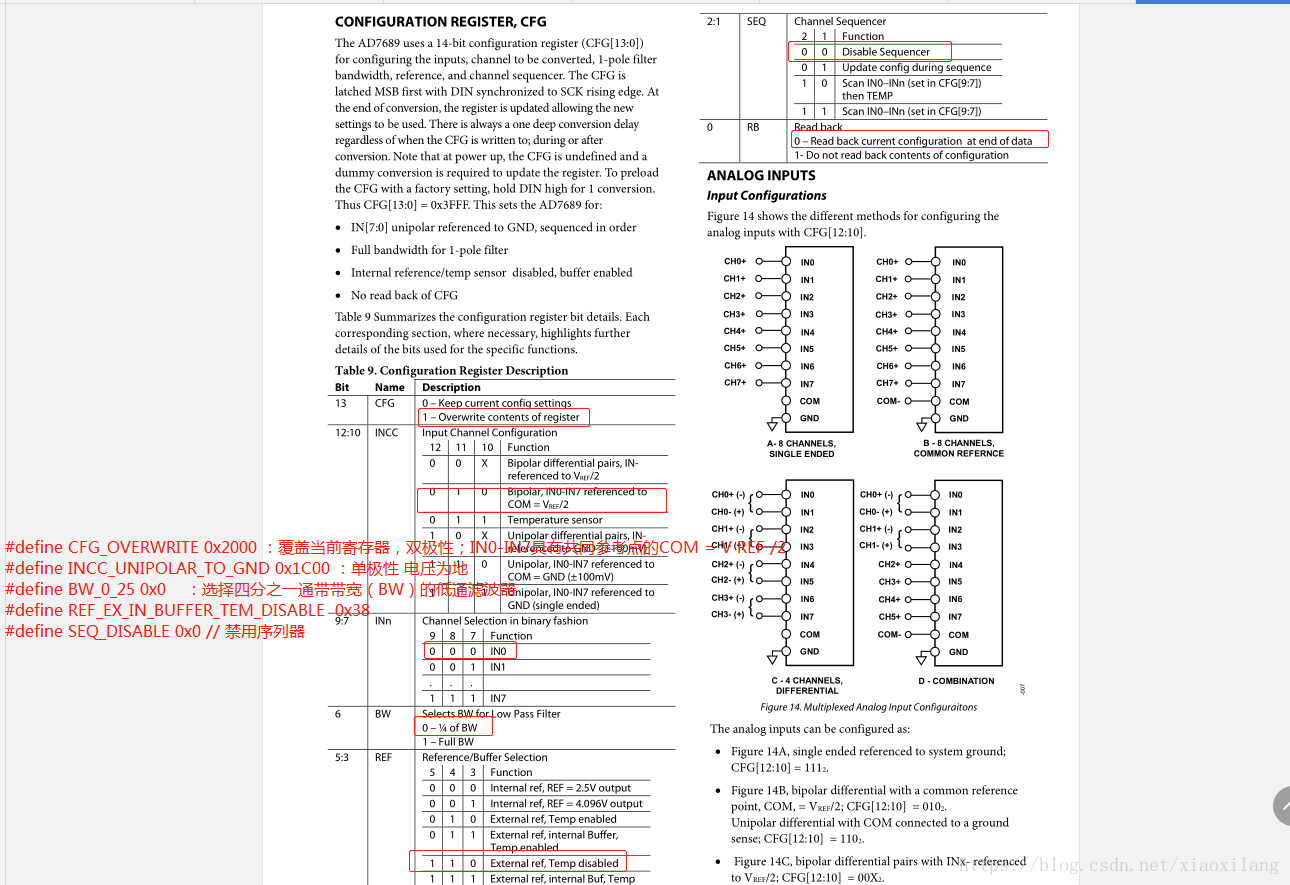
CFG字按照PDF文档配置后需要向左移动两位:
(CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN0 | BW_0_25 | REF_EX_IN_BUFFER_TEM_DISABLE | SEQ_DISABLE | RB_DISABLE)<<2
#define CFG_OVERWRITE 0x2000 :覆盖当前寄存器,双极性;IN0-IN7具有共同参考点的COM = V REF /2
#define INCC_UNIPOLAR_TO_GND 0x1C00 :单极性 电压为地
#define BW_0_25 0x0 :选择四分之一通带带宽(BW)的低通滤波器
#define BW_FULL 0x40 :全通带带宽(BW)的低通滤波器
#define REF_EX_IN_BUFFER_TEM_DISABLE 0x38
#define SEQ_DISABLE 0x0 // 禁用序列器
ADC的计算:
Vin/Vref=code/2^N、 N为ADC的位数(16bit),Vin为输入电压(0~3v),Vref为参考电压(5v,以实际为准):
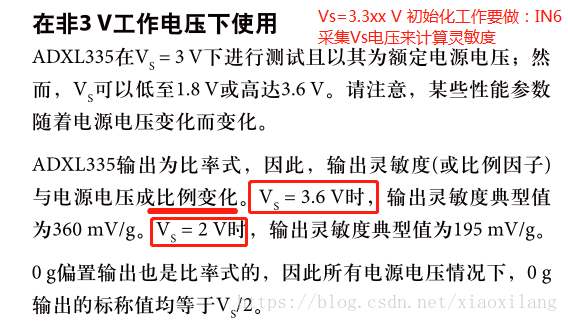
-----------ad7689采集数据结束之后,计算加计的灵敏度----------------
初始化: V_3是读出IN6的参考电压(3.3V,具体以实际为主)
------有了灵敏度才可以计算出具体的加速度数值-------
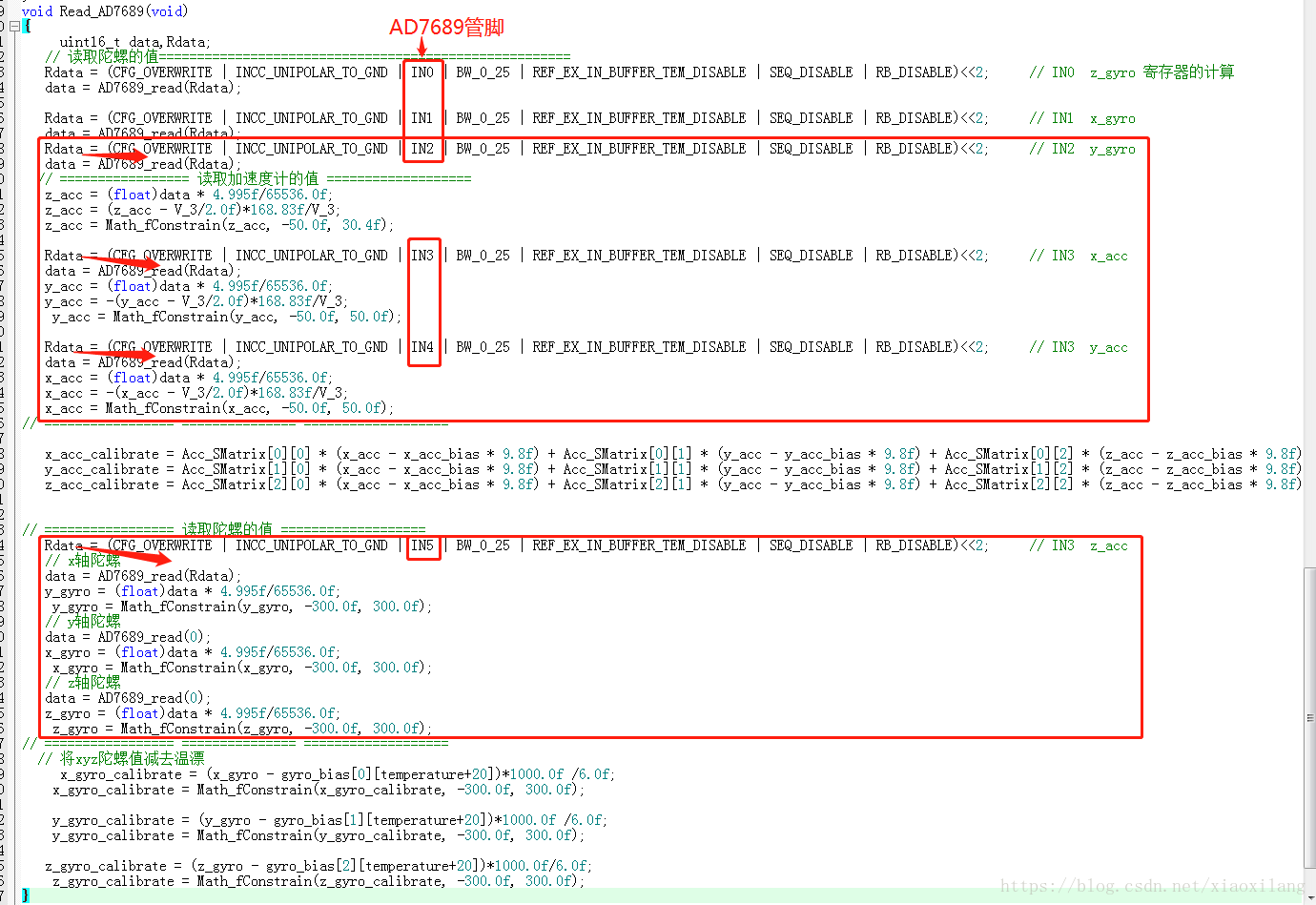
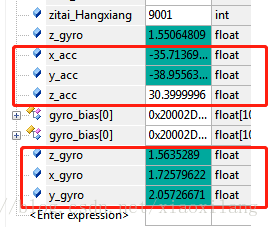
------------获得的数据继续算出校准之后的数据------------

----------数据进行滤波,单位转换-----------
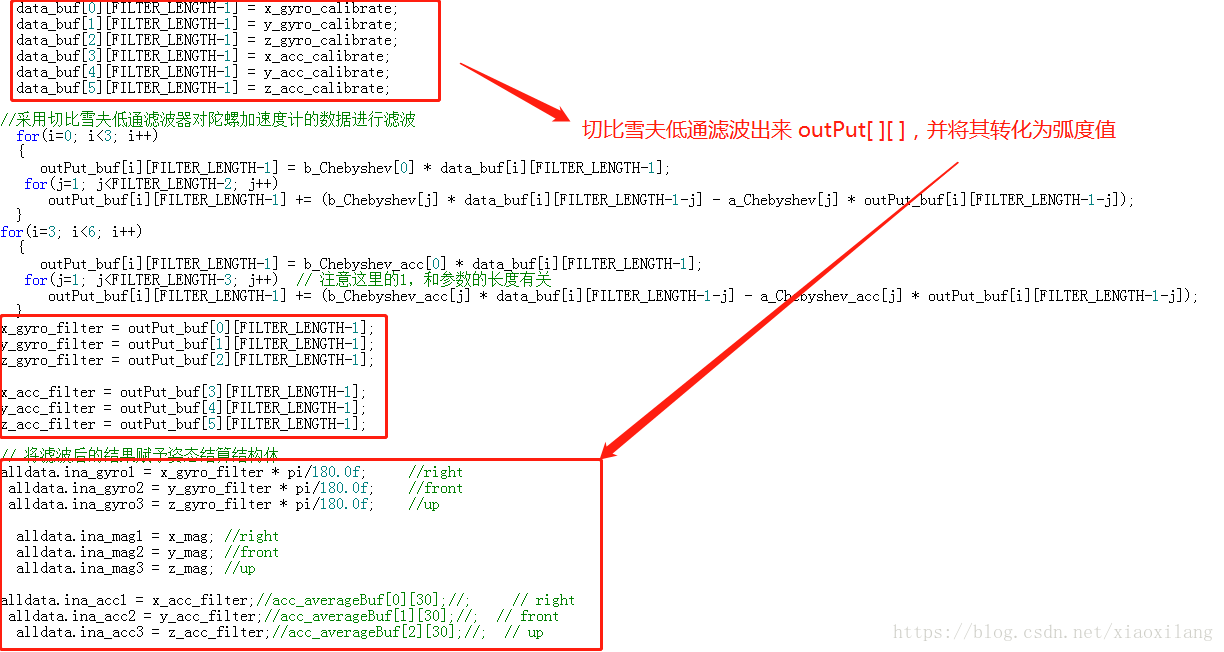
-----------传感器的数据,原始的积累部分已经完成,接下来开始应用---------------
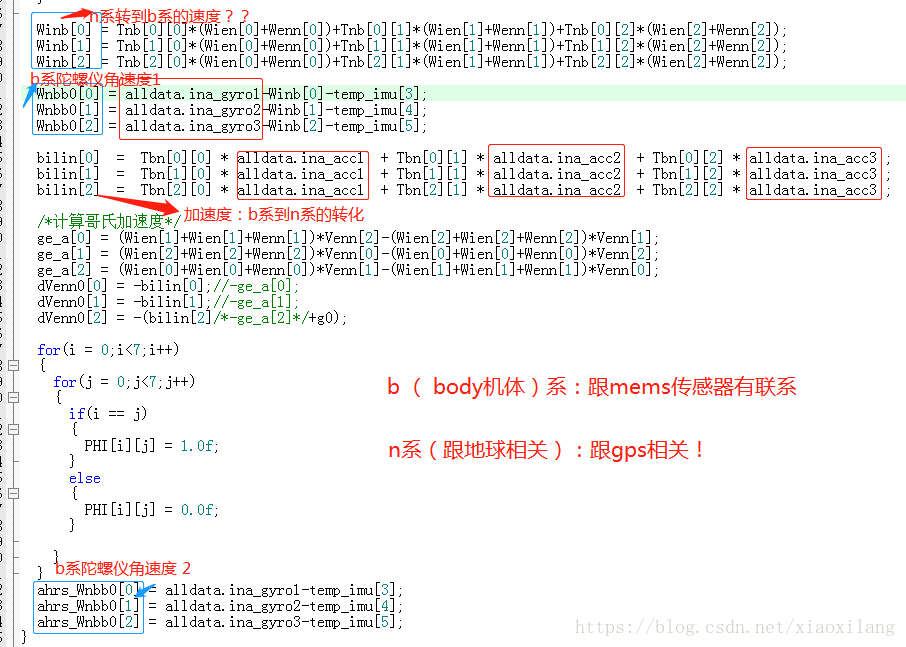
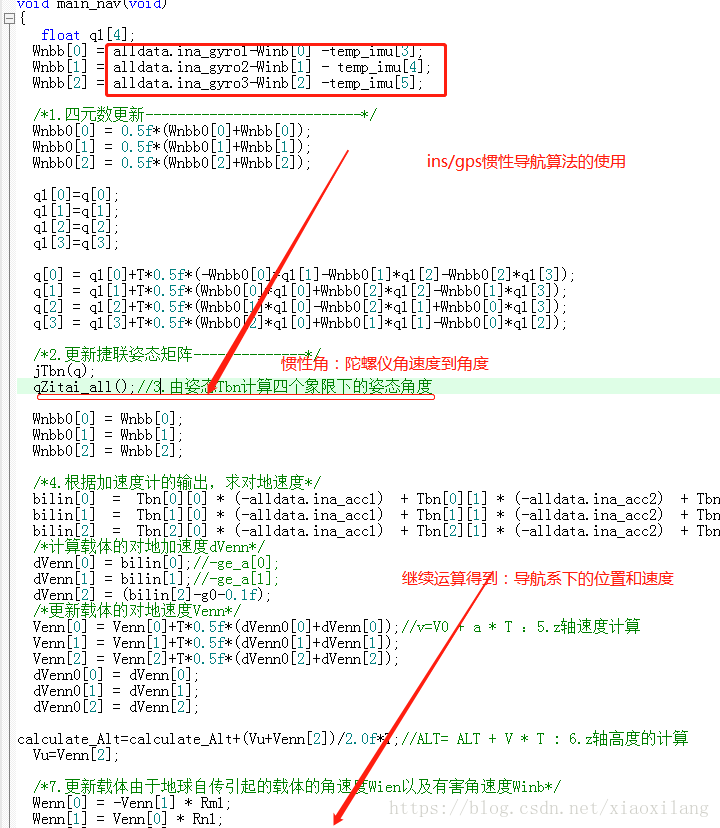
---INS/GPS系统---
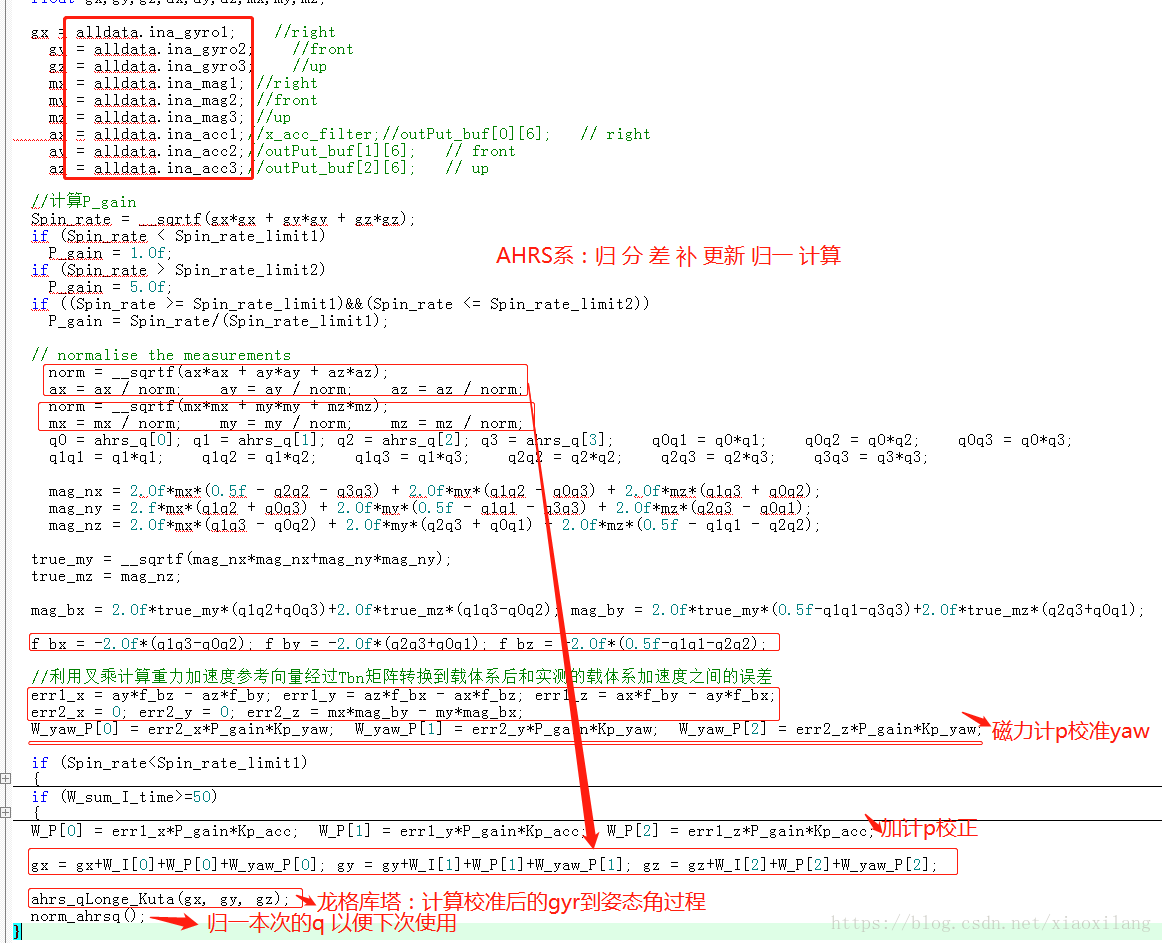
------------AHRS系统----
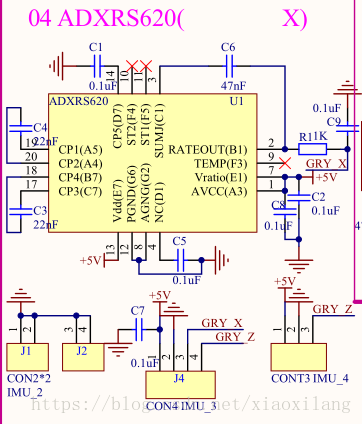
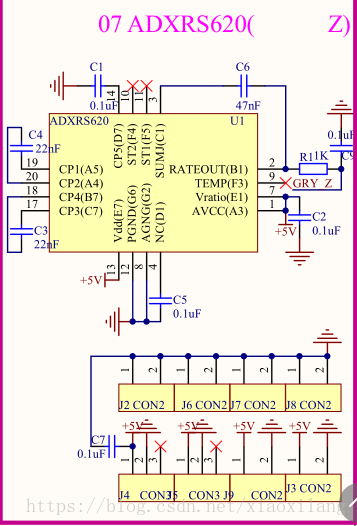
==============附:陀螺电路==================