COCOFLY教程
——疯壳·无人机·系列
360 度翻滚

图1
一、“360 度翻滚”功能简介
360 度翻滚是 COCOFLY 的一大特色功能,支持前、后、左、右四个方向的
360 度翻滚,具体的实现方法如下:
(1)把打开电源的无人机平放在地面上,操控者站在飞机后面一到两米处, 打开遥控电源;
(2)飞机开机后默认是上锁状态,螺旋桨底部的呼吸灯会缓慢地明亮变幻;
(3)打开遥控器,左摇杆拉倒左下角,保持大概 2s,飞机指示灯闪烁一下, 表示解锁成功;
(4)解锁成功后松开摇杆,指示灯呈不断双闪状态,四个螺旋桨会低速转动;
(5)按下左摇杆按键,飞机会起飞到 1 米左右悬停;
(6)往上推油门,增加飞行高度到 1.5 米左右(执行翻滚操作最好高一点);
(7)正常飞行过程中,按一下左摇杆的按键,然后 2 秒内拨动右摇杆选择
翻滚方向即可实现翻滚操作。例如:按下左摇杆的按键,然后 2 秒内把右摇杆往前拨,则可实现飞机向前翻滚。
二、代码相关
代码中实现无人机翻滚主要依托于“filp”这一结构体,其中 flip.angle_x 和flip.angle_y 负责翻滚角度设置。无人机要想实现翻滚只需要对 flip.angle_x 和flip.angle_y 赋值即可,比如向右翻滚一圈,flip.angle_x=-360,flip.angle_y=0, 其中“flip.angle_x”对应无人机的左右方向,“flip.angle_y”对应前后方向。相关的代码如下图所示。
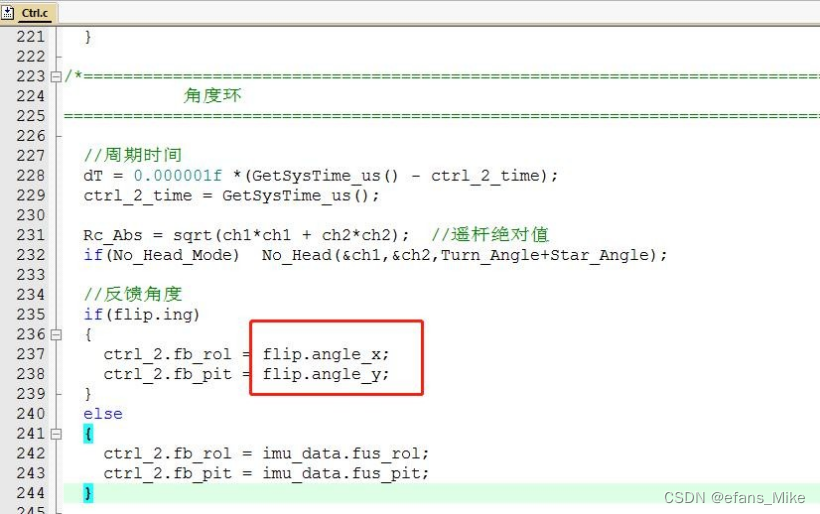

图2
更多完整学习资料和对应开源套件,请登陆官网:“疯壳”
如需定制开发,请通过官网“疯壳”网页底部的“联系我们”进行联系