1.评价一个mcu,主要看其系统的资源,
系统的资源,除了物理层上厂家已经定死的固定驱动数量(比如串口数量,iic数量,spi数量或者can数量等等,这个我们没法改变),除此之外,针对我们可以操作的软件层面,系统资源还大致可以分为时间资源和空间资源,这两个资源,在小型系统上的重要性不太明显,但是代码量增大之后,经常不可避免的出现hardfault之类的,或者代码执行不准确等等“莫名其妙”的问题;
2,故给出使用systick嘀嗒定时器,来评价你的嵌入式系统执行效果;
毕竟是定时器,一定具有定时器的特征:定时器的时钟/分频以及重载值+定时器中断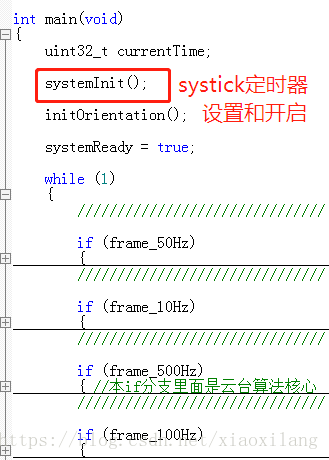
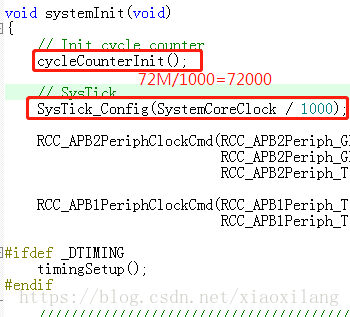
故:很简单的计算出这个嘀嗒定时器的中断次数(我mcu是F103的,所以系统时钟是72Mhz)
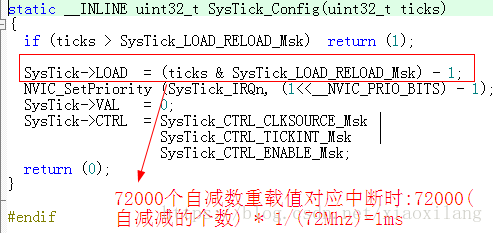
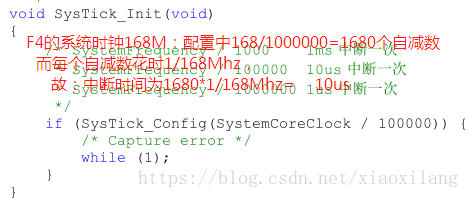
同理,请大家参考我在F4上的设置:
3
——————————————————
uint32_t micros(void)
{
register uint32_t oldCycle, cycle, timeMs;
do
{
timeMs = __LDREXW(&sysTickUptime);//将&sysTickUptime地址的数值给timeMS
cycle = *DWT_CYCCNT;
oldCycle = sysTickCycleCounter;
}
while (__STREXW(timeMs , &sysTickUptime));//保存MS到sysTickUptime
return (timeMs * 1000) + (cycle - oldCycle) / usTicks;
}
----------------------------------------------------------
if (frame_50Hz)
{
frame_50Hz = false;
currentTime = micros();
deltaTime50Hz = currentTime - previous50HzTime;
previous50HzTime = currentTime;
。。。。
executionTime50Hz = micros() - currentTime;
}
if (frame_10Hz)
{
frame_10Hz = false;
currentTime = micros();
deltaTime10Hz = currentTime - previous10HzTime;
previous10HzTime = currentTime;
......
executionTime10Hz = micros() - currentTime;
}
if (frame_500Hz)
{
frame_500Hz = false;
currentTime = micros();//获取当前时间
deltaTime500Hz = currentTime - previous500HzTime;//得到时间增量
previous500HzTime = currentTime;//保存当前时间
executionTime500Hz = micros() - currentTime;//本次运算执行时间长度保存到executionTime500Hz
}
。。。。
--------------------------
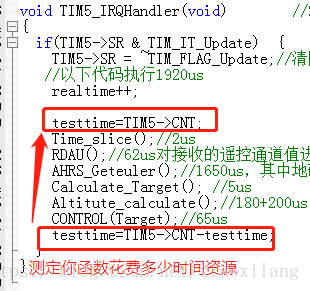
4。还有一个办法,利用普通的定时器来判断具体函数所耗费的时间资源,比如下实例:TIMx->CNT;