扩展卡尔曼滤波算法
传感器融合算法
卡尔曼滤波算法
最小二乘法
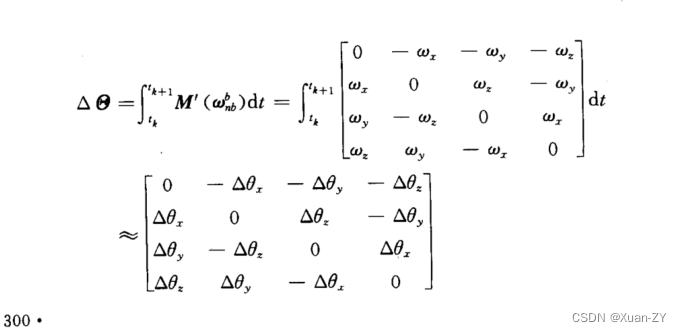
毕卡逼近法


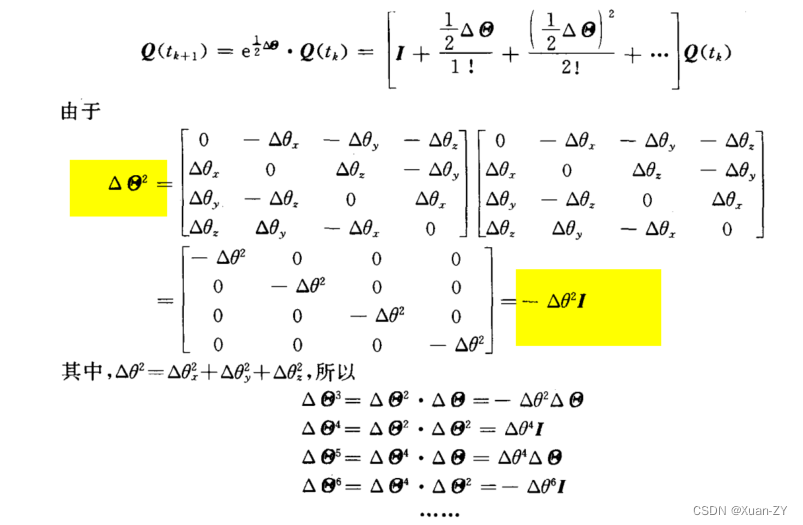
对上式进行泰勒展开
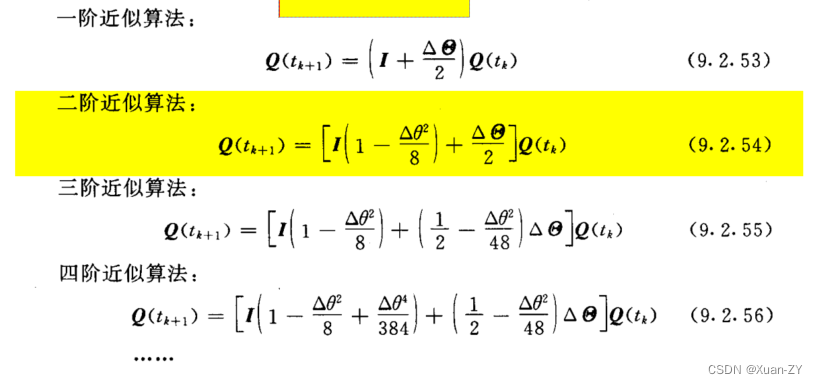
得到四元数各阶近似算法:
梯度下降算法
互补滤波算法
chatgpt解释:
互补滤波(Complementary Filter)算法是一种常用的传感器融合技术,用于将多个传感器的数据进行合理的组合和融合,以提高姿态、位置或其他相关参数的估计精度。
互补滤波算法通常应用于惯性测量单元(IMU)数据的融合,将加速度计和陀螺仪的数据进行组合。加速度计提供了重力方向的信息,但对于快速动作或振动敏感,而陀螺仪提供了旋转速度的信息,但对长期稳定性不够准确。互补滤波算法通过权衡两者的优势,结合它们的测量结果,得到更加稳定和准确的姿态估计。
以下是互补滤波算法的基本原理:
- 数据预处理:首先,对加速度计和陀螺仪的原始数据进行预处理,如单位转换、去除偏置等。确保数据在同一参考帧下,并具有一致的量纲。
- 计算姿态角度:使用陀螺仪的数据积分来计算姿态角度的变化速率。这个角度变化速率表示物体的旋转情况。
- 互补滤波更新:将加速度计提供的姿态角度作为参考,与陀螺仪积分得到的角度变化速率进行加权组合。通常,加速度计提供的姿态角度权重较高,陀螺仪的角度变化速率权重较低。这样可以保持加速度计的稳定性,并消除陀螺仪的漂移问题。
- 输出姿态估计:根据互补滤波更新后的姿态角度,可以得到更准确的姿态估计结果。这个估计结果可以用于导航、姿态控制等应用。
互补滤波算法的关键在于权衡和调整加速度计和陀螺仪的权重。权重的选择取决于具体的应用需求和传感器特性。通常情况下,加速度计的权重在0.9到0.98之间,陀螺仪的权重在0.02到0.1之间。
需要注意的是,互补滤波算法对于加速度计和陀螺仪之外的其他传感器也可以进行扩展和应用。例如,地磁传感器用于提供方向信息,气压计用于高度估计等。
互补滤波算法是一种简单但有效的传感器融合方法,能够结合多个传感器的优势,提高姿态、位置等参数的估计精度。它广泛应用于机器人、无人机、虚拟现实等领域,以实现精确的姿态控制和导航功能。