文档参考:上海丙寅电子有限公司 技术文档
导语:磁力计传感器取自于大地磁感应的强度hx,hy,hz;
1如何得到罗盘的方位角:怎么才能够从简单的 3 轴数据得到罗盘的方位角
1,水平匀速旋转,收集 XY轴的数据
2,转动器材90度(此时Z轴水平)匀速旋转以收集 Z轴数据
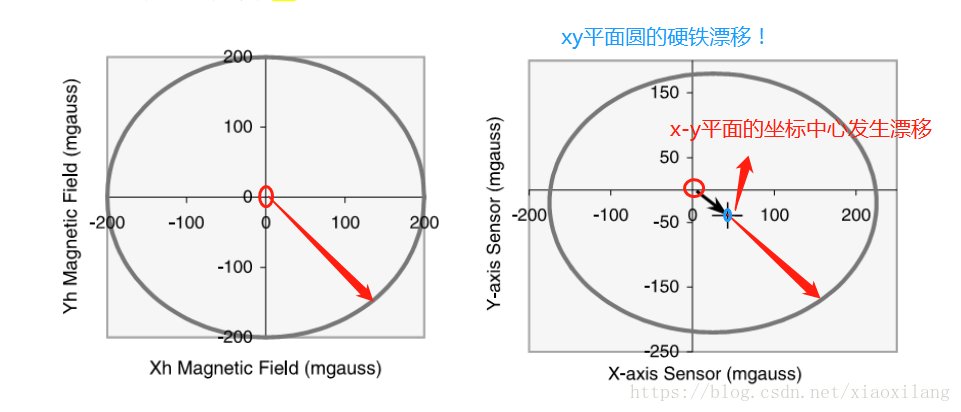
3,将读取到的各轴数据的最大值加上最小值除以 2,就得到一个各轴的 offset值
Xoffset= (Xmax+Xmin )/2
Yoffset= (Ymax+Ymin )/2
Zoffset= (Zmax+Zmin )/2
4,然后将磁力计读取的各轴的裸值减去前面计算所得的 offset值,就可以得到用作角度计算的 Heading值
X H =X 裸 -Xoffset
Y H =Y 裸 -Yoffset
Z H =Z 裸 -Zoffset
5.如果只用作水平测量,则此时的方位角为 方位角=arctanY H /X H
6.加速度传感器对磁力计进行倾角补偿:
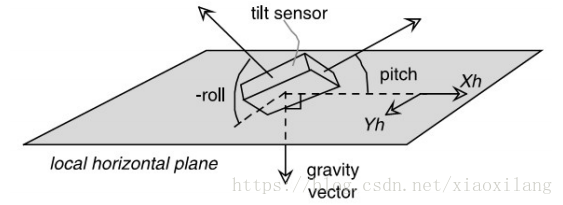
如果在测量时,我们的器件不是处在水平位置,套用以上公式,罗盘的方位角将出现偏差(比如在斜坡对无人机作起飞操作的时候),此时就需要使用加速度传感器对磁力计进行倾角补偿。要对电子罗盘进行倾角的补偿,首先要计算出横滚角( θ)Roll以及俯仰角( φ)Pitch代入以下公式 , 计算Heading值
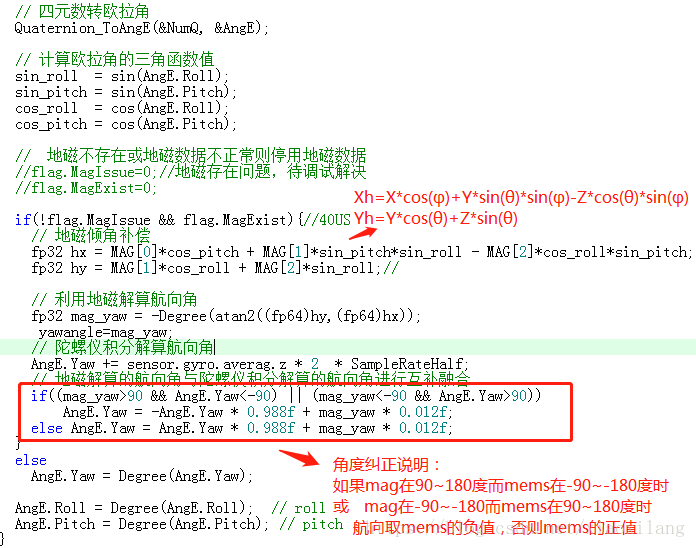
Xh= X*cos(φ)+Y*sin(θ)*sin(φ)-Z*cos(θ)*sin(φ)Yh= Y*cos(θ)+Z*sin(θ)
考虑到角度的4个象限(-180,-90,0,90,180),航向角的计算公式可变为以下公式
for(Xh<0)=180-[arctan(Yh/Xh)*180/π]
for(Xh>0,Yh<0)=-[arctan(Yh/Xh)*180/π]
for(Xh>0,Yh>0)=360-arctan(Yh/Xh)*180/π
for(Xh=0,Yh<0)=90
πfor(Xh=0,Yh>0)=270
===========================================
7.见图分析:这个校准使用的是互补滤波融合;这个比较简单的操作(只能根据符号校准)
接下来讲述基于旋转矩阵校yaw的较为复杂的融合算法;(跟加计基于旋转举证校准陀螺仪的类似),
见:作为无人机方面做嵌入式编写的飞控总结5-磁力计对航向角yaw的校准2(磁力计如何校正航向)