目录
2020年,Facebook使用Transformer进行目标检测。全新的架构,目标检测里程碑式工作。
之前目标检测中不论proposal based的方法还是anchor based 的方法,都需要nms(非极大值抑制)等候处理的方法筛选bbox(bounding box)。由于nms的操作,调参比较复杂,而且模型部署起来也比较困难。因此,一个端到端的目标检测模型是一直以来所追求的。DERT很好的解决了上述问题,不需要proposal和anchors,利用Transformer全局建模的能力,把目标检测看成集合预测的问题。而且由于全局建模的能力,DETR不会输出太多冗余的边界框,输出直接对应最后bbox,不需要nms进行后处理,大大简化了模型。
摘要:将目标检测看作集合预测任务,不需要nms处理和生成anchor。DETR提出两个东西,一是目标函数,通过二分图匹配的方式,使得模型输出独一无二的预测,就是说没有那么多冗余的框了。二是,使用Transformer的编码器解码器架构。具体还有两个小细节,一个是解码器这边还有另外一个输入,learned object query,类似于anchors,DETR可以将learned object query和全局图像信息结合起来,通过不停的做注意力操作,从而使得模型直接输出最后的预测框。二是并行的方式,与2017Transformer用在NLP领域使用掩码解码器(自回归方式:一个单词一个单词翻译)不同,这里视觉任务中,图像中目标没有依赖关系。另一方面也是希望越快越好。DETR最主要的优点就是非常简单,性能也不错,在COCO数据集可以和Faster RCNN基线网络打平。另外,DETR可以非常简单的拓展到其他任务上。
1.引言
集合预测问题,现在都是用间接的方式。如proposal的方式,Faster R-CNN、Mask R-CNN、Cascade R-CNN。anchors方式,YOLO、Focal loss。还有no anchor based 的方法,用物体中心点(window centers)Center Net、FCOS。会生成冗余 框,就会使用nms。
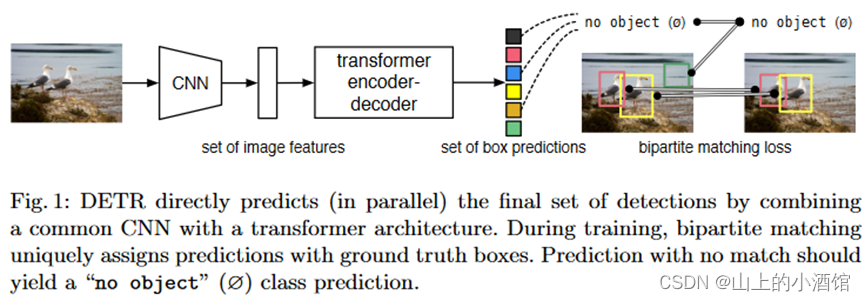
DETR训练过程:
第一步用CNN抽特征。
第二步用Transformer编码器去学全局特征,帮助后边做检测。
第三步,结合learned object query用Transformer解码器生成很多预测框。
第四步,匹配预测框与GT框,在匹配上的框里做目标检测的loss。
DETR推理过程:
第一步用CNN抽特征。
第二步用Transformer编码器去学全局特征,帮助后边做检测。
第三步,结合learned object query用Transformer解码器生成很多预测框。
第四步,置信度大于0.7的作为前景物体保留,其余作为背景。
性能方面,在COCO数据集上,能和Faster RCNN打成平手,不论是AP还是模型规模和速度上。DETR对大物体检测效果比较好,不受限于生成anchor 的大小。但DETR在小物体上效果就差一点,但是作者很乐观,接下来会有跟进工作解决小物体检测问题。另一方面是DETR训练比较慢,作者训练了500个epoch,一般只需十几个epoch。
2.相关工作
2.1集合预测
2.2Transformer Decoder 并行
2.3目标检测研究现状
现在研究都是基于初始预测进行检测,two stage 的方法基于proposal,signal stage的方法基于anchors(物体中心点)。
proposal和 anchors的联系:当anchor生成以后就要生成最终的Proposal了。首先对anchor有两部分的操作:分类和边框回归。分类通过softmax进行二分类,将anchor分为前景和背景,分别对应positive和negative。边框回归获取anchor针对ground true的偏移。得到这两个信息后开始选取符合条件的anchor作为Proposal。
第一步:先将前景的anchor按照softmax得到的score进行排序,然后按设定值取前N个positive anchor;第二步:利用im_info中保存的信息,将选出的anchor由M×N的尺度还原回P×Q的尺度,刨除超出边界的anchor;第三步:执行NMS(nonmaximum suppression,非极大值抑制);第四步:将NMS的结果再次按照softmax的score进行排序,取N个anchor作为最终的Proposal;
3.DETR方法部分
3.1目标检测集合预测的目标函数
匈牙利算法解决二分图匹配问题。Scipy中有linear-sum-assignment函数,输出为cost matrix,输出为最优的方案。
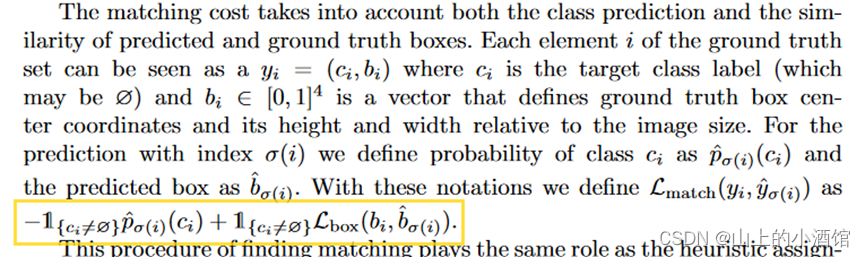
目标检测的损失由两部分组成,一是分类类别对不对,二是目标检测框回归参数。

这里找最优匹配的方式和原来利用先验知识去把预测和proposal和anchors匹配的方式一样,只不过这里的约束更强,一定要得到一个一对一的匹配关系,后续就不需要nms处理。

一旦得到了最佳匹配,即知道生成的100个框中哪个与gt是最优匹配的框,就可以进一步与GT框计算损失函数,然后做梯度回传。
作者在这里发现第一部分分类loss去掉log对数,可以使得前后两个损失在大致的取值空间。第二部分边界框回归损失,不仅使用了L1-loss(与边界框有关,大框大loss),还使用了generalize iou loss。
3.2DETR模型架构

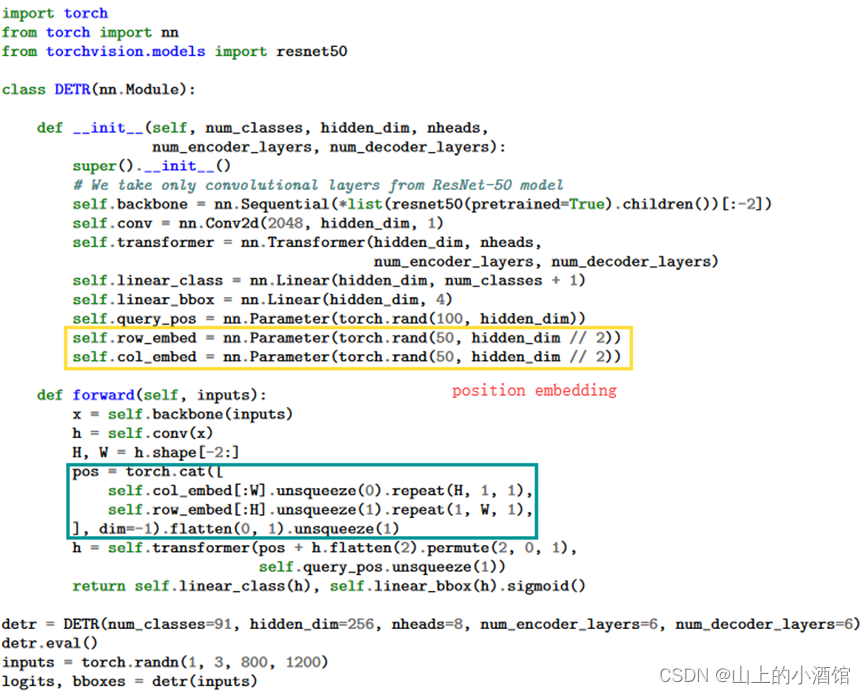
第一步,输入3×800×1066,经过CNN得到2048×25×34,然后经过1×1的卷积降维得到256×25×34的特征图,加入位置编码后拉长得到850×256(序列长度850,嵌入维度256)。第二步进入Transformer编码器得到850×256的输出(可以理解为做了全局信息的编码)。第三步Transformer的输入为可学习的object queries100×256(100个框256维度)。输出维度不变100×256。第四步通过FFN也就是全连接层,每个框得到6个输出分别对应前景背景概率,框的边界信息(对角线两个坐标。)然后使用匈牙利算法计算最匹配的框,然后根据GT计算梯度,反向回传更新模型。
4.实验部分
4.1性能对比
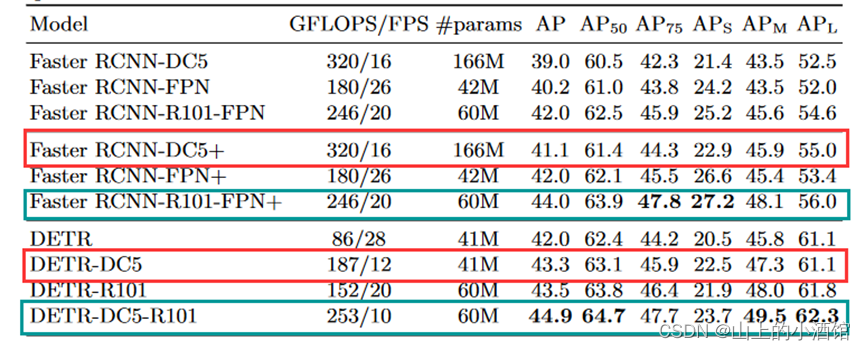
gflops代表模型大小,FPS代表推理速度。虽然DETR的GFLOPS和参数量相对于Faster RCNN较少,但是推理速度还是稍微慢一点。对于小物体,Faster -RCNN比DETR要高4个点左右,但是对于大物体,DRTE要比Faster-RCNN高出6个点左右。作者认为DETR没有anchors尺寸的限制,并且使用的Transformer具有全局建模能力,对大物体比较友好。
4.2可视化
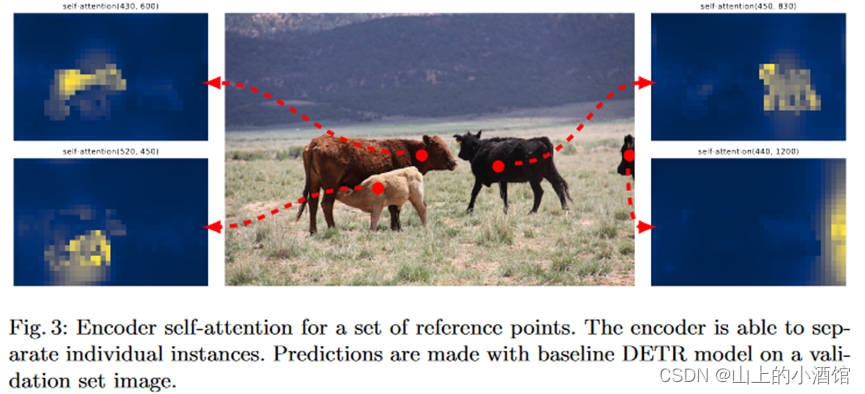
作者将编码器的注意力可视化出来了,每个物体选一个点计算自注意力。我们可以发现,经过Transformer Encoder后每个物体都可以很好的区分开来了,这时候再去做目标检测或者分割任务就简单很多了。
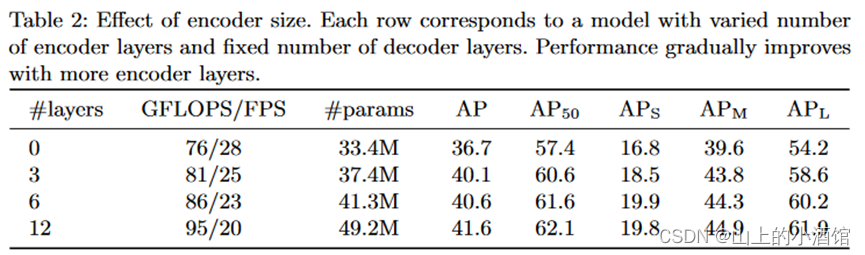
不同深度的Transformer层对模型性能的影响。模型越深效果越好,并且没有明显的饱和的倾向。
4.3Transformer解码器
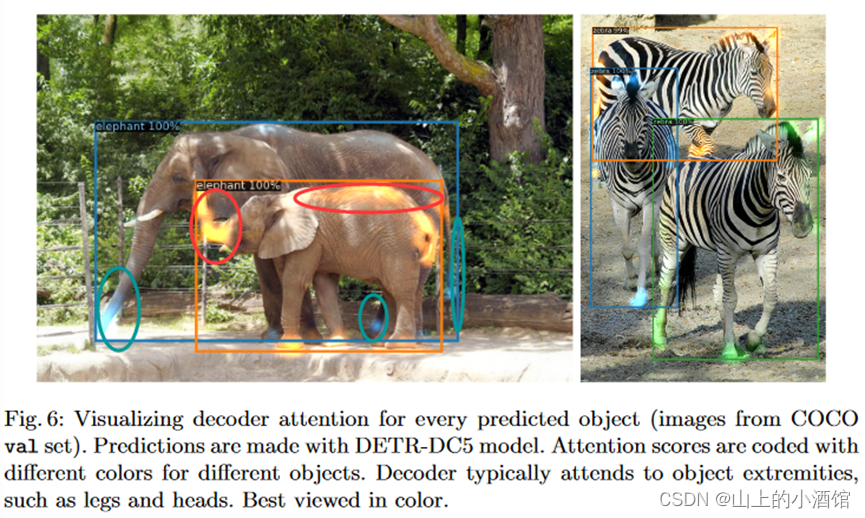
对于小象和大象存在较大的重叠部分,大象用蓝色表示,大象的蹄子部分以及尾巴部分都是蓝色的标记。小象背部黄色的标记。这都说明解码器能够将两个目标各自的部分区分开来。另外就是斑马的条纹,DETR依然能够区分出每个斑马的轮廓并学到各个目标的条纹。
DETR的encoder是学一个全局的特征,让物体之间尽可能分得开。但是对于轮廓点这些细节就需要decoder去做,decoder可以很好的处理遮挡问题。
4.4object query可视化

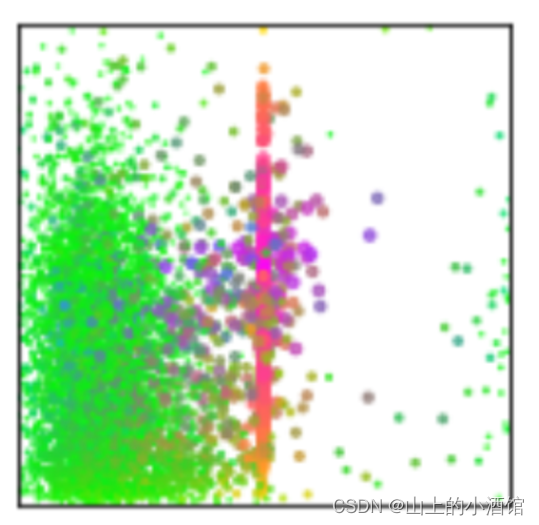
作者将COCO数据集上得到的所有输出框全都可视化出来。作者将100个object query中20个拿出来,每个正方形代表一个object query。每个object query相当于一个问问题的人,绿色代表小的检测框,红色代表竖向大的检测框,蓝色代表大的横向检测框。例如第一个图,就是不断查询左下角是否有小的目标,中间是否有大的竖向的目标。当经过100个不同object query查询完成后,目标也就检测完成了。
5.结论
DETR在COCO数据集上与Faster R-CNN基线模型打成平手,并且在分割任务上取得更好的结果。最主要的优势是简单,可以有很大的潜能应用在别的任务上。作者又强调了一下,DETR在大物体上效果非常好。文章存在的缺点作者也自己指出:推理时间有点长、由于使用了Transformer不好优化、小物体上性能也差一些。后来,Deformable DETR解决了推理时间和小物体检测差的不足。
后续工作:omni-DETR;up-DETR;PnP-DETR;SMAC-DETR;Deformer-DETR;DAB-DETR;SAM-DETR;DN-DETR;OW-DETR;OV-DETR
DETR使用object query代替了原来生成anchors的方式,运用二分图匹配代替了nms这一步,讲很多不可学习的东西变得可以学习了,相当于给了一个更强的约束。
python的学习还是要多以练习为主,想要练习python的同学,推荐可以去看,他们现在的IT题库内容很丰富,属于国内做的很好的了,而且是课程+刷题+面经+求职+讨论区分享,一站式求职学习网站,最最最重要的里面的资源全部免费。

他们这个python的练习题,知识点编排详细,题目安排合理,题目表述以指导的形式进行。整个题单覆盖了Python入门的全部知识点以及全部语法,通过知识点分类逐层递进,从Hello World开始到最后的实践任务,都会非常详细地指导你应该使用什么函数,应该怎么输入输出。
牛客网(牛客网 - 找工作神器|笔试题库|面试经验|实习招聘内推,求职就业一站解决_牛客网)还提供题解专区和讨论区会有大神提供题解思路,对新手玩家及其友好,有不清楚的语法,不理解的地方,看看别人的思路,别人的代码,也许就能豁然开朗。
快点击下方链接学起来吧!
牛客网 - 找工作神器|笔试题库|面试经验|实习招聘内推,求职就业一站解决_牛客网
参考:
论文地址:https://arxiv.org/pdf/2005.12872.pdf
参考:
DETR 论文精读【论文精读】_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1GB4y1X72R
https://www.bilibili.com/video/BV1GB4y1X72R