开始之前必须要说的一些事
一、参考文章
- (c++)[图像处理]边缘提取以及Harris角点检测1
- (python)OpenCV-Python的文本透视矫正与水平矫正2
- (python) Python - 异常值检测(绝对中位差、平均值 和 LOF)3
二、实验目标
- 提取票据的外边届
- 提取票据的4个顶点
- 目标图片:

三、局限性声明
本文源于计算机视觉学习中的一次作业。由于样本不足,我认为本算法存在着不容忽视的局限性,这些局限性可能会导致本算法虽具备一定的鲁棒性(对这三个目标而言是足够的),但不够健壮。
开始说正事了,所以标题一定要比第一个一级标题长
一、思路
在本次实验之前,老师给出了基于Hough变换和基于Harris角点检测的两种解题思路。在本文中,我采纳了后者。
在这里,我把两种思路都贴出来:
(一)基于Harris角点检测[本文思路]
- 调用HarrisDetect(imagefile),求票据四个顶点
- 由顶点连线形成票据外边界
(二)基于Hough变换[参考思路]
- 利用Hough变换检测票据外边界
- 识别主要边,利用直线方程计算出角点并标出
在寻找资料的过程中,我发现有两篇文章是基于Hough变换实现的。虽然使用的语言是c++,但还是具有很好的参考价值:
《计算机视觉与模式识别(1)—— A4纸边缘提取》4
《[计算机视觉] A4纸边缘检测》5
二、实现
我的Main函数在干什么?
在看代码的时候,我的习惯是先看Main()。这样能让我最快知道我的代码的主要流程。
具体为什么是这些步骤,在后面每一步里我都写了分析。
# 导入图像
filename = 'ex0301.jpg'
# filename = 'ex0302.jpg'
# filename = 'ex0303.bmp'
img = cv2.imread(filename)
imgCopy = img.copy()
# 调整图像角度
degree = CalcDegree(img) # 求矩形主要方向与x轴的夹角degree
if degree != 0: # 若夹角不为0,则图像需要旋转
rotate = rotateImage(img, degree)
imgCopy = rotate.copy()
else: # 夹角很小时,可以不旋转
rotate = img.copy()
# Harris角点检测
Harris_img = HarrisDetect(rotate)
# 利用掩模限制角点结果分布
mask = getMask(imgCopy, Harris_img)
# 求四个角点,标出,连线
pointDetect(mask, imgCopy)
cv2.waitKey(0)
cv2.destroyAllWindows()
分步实现!
(一)调整图像角度
参考资料: ① openCV-Python的文本透视矫正与水平矫正2
② Python - 异常值检测(绝对中位差、平均值 和 LOF)3
为什么这样做?
根据观察实验目标,可以发现,样本图片其实并没有透视、变形等比较复杂的图像畸变。因此,使代码具有适应性,对于这三张图而言,就变成了我们需要去调整他们的旋转角而已。
样本劣势 & 局限性分析
① 样本的旋转角(检测出的主要方向和x轴的夹角)都在90°以内,因此,对于90°<theta<180°的情况,在本代码中没有进行处理;
② 样本畸变简单,本代码只能处理具有旋转变形的部分图像。
这一部分的代码,是我在参考资料①2的基础上改写的。虽然原文是校正文字的旋转变形,但其思想是可以被用在本文中的情况的。在这里贴上它的主要思路,详细代码可以点进链接看:
(1)用霍夫线变换探测出图像中的所有直线
(2)计算出每条直线的倾斜角,求他们的平均值
(3)根据倾斜角旋转矫正
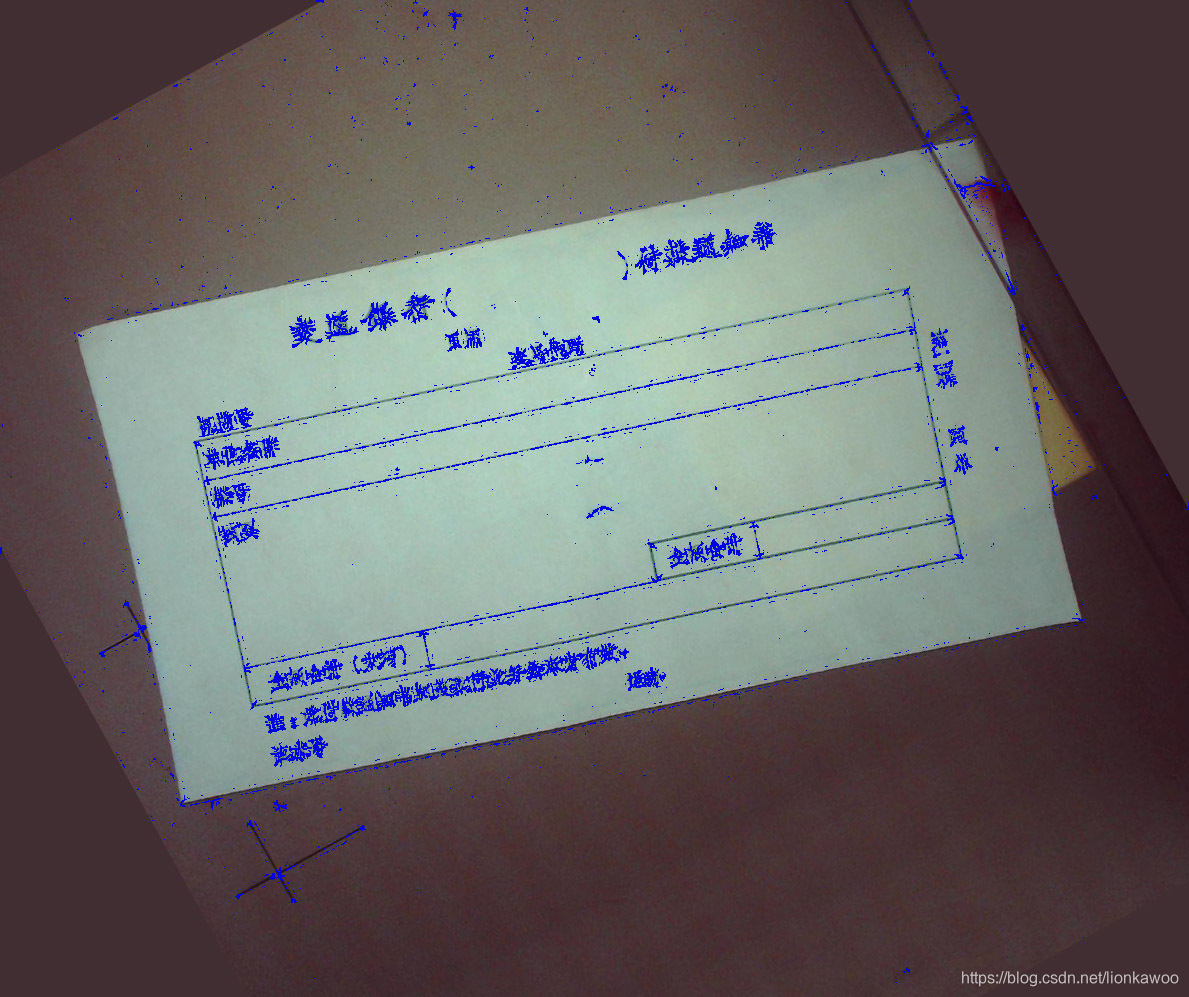
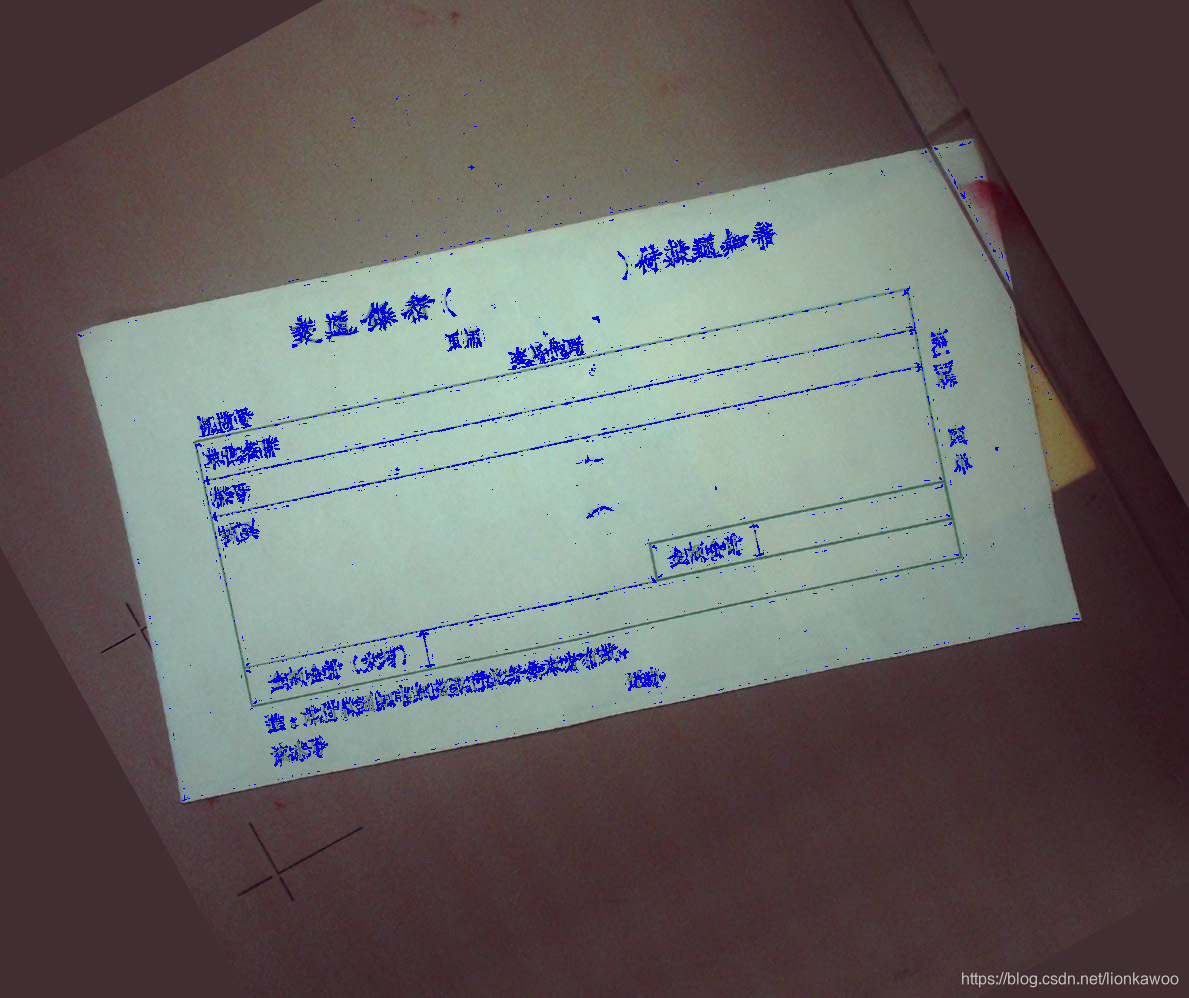
原文思路很完美了~但因为面对目标不同,在我实际运用的时候还是出现了一些小问题。请看图:

可以看到,除了主轴方向以外,HoughLines()还为我们检测了不少我们并不想要的线(主要是右边垂直的一簇),
我们把这些不想要的结果称之为异常值,它们偏离了主轴。
而在原文中,思路(2)是这么写的:“计算出每条直线的倾斜角,求他们的平均值。”
可以想到,如果异常值和正常值一起加入计算平均值的队伍,那么实际的结果会和想要的结果有很大的误差。
因此,在计算平均值前,我们还要对异常值进行检测和剔除。
由此一来,我们的思路变成了:
- 用霍夫线变换探测出图像中的所有直线
- 计算出每条直线的倾斜角
- 判断这条直线的是不是主要方向上的直线,如果不是,扔掉它
- 求主轴上的所有直线的倾斜角的平均值
- 根据倾斜角旋转矫正
getMAD(s):利用绝对中位差剔除异常值
虽然知道了要把异常值剔除,但是具体应该怎么操作呢?
在我苦思无果,在网上一顿冲浪之后,发现了伟大数学家还真的发明了这么一个东西,专门用来针对“异常值”。(也太强了)
请看:Python - 异常值检测(绝对中位差、平均值 和 LOF)
def getMAD(s):
median = np.median(s)
# 这里的b为波动范围
b = 1.4826
mad = b * np.median(np.abs(s-median))
# 确定一个值,用来排除异常值范围
lower_limit = median - (3*mad)
upper_limit = median + (3*mad)
# print(mad, lower_limit, upper_limit)
return lower_limit, upper_limit
CalcDegree(srcImage): 校正图像旋转变形
剔除了异常值后,就可以继续原文的操作啦。具体步骤直接看代码叭,我想我的注释写的已经足够详细了-。-~
# 通过霍夫变换计算角度
def CalcDegree(srcImage):
midImage = cv2.cvtColor(srcImage, cv2.COLOR_BGR2GRAY)
dstImage = cv2.Canny(midImage, 50, 200, 3)
lineimage = srcImage.copy()
# 通过霍夫变换检测直线
# 第4个参数为阈值,阈值越大,检测精度越高
lines = cv2.HoughLines(dstImage, 1, np.pi / 180, 200)
# 由于图像不同,阈值不好设定,因为阈值设定过高导致无法检测直线,阈值过低直线太多,速度很慢
sum = 0
# 绝对中位差排除异常值
thetaList = []
for i in range(len(lines)):
for rho, theta in lines[i]:
thetaList.append(theta)
#print(thetaList)
lower_limit, upper_limit = getMAD(thetaList)
# 判断是否需要旋转操作
thetaavg_List = []
for i in range(len(lines)):
for rho, theta in lines[i]:
if lower_limit <= theta <= upper_limit:
thetaavg_List.append(theta)
thetaAvg = np.mean(thetaavg_List)
#print(thetaAvg)
deviation = 0.01
if (np.pi/2-deviation <= thetaAvg <= np.pi/2+deviation) or (0 <= thetaAvg <= deviation) or (np.pi-deviation <= thetaAvg <= 180):
angle = 0
else:
# 依次画出每条线段
for i in range(len(lines)):
for rho, theta in lines[i]:
if lower_limit <= theta <= upper_limit:
#print("theta:", theta, " rho:", rho)
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(round(x0 + 1000 * (-b)))
y1 = int(round(y0 + 1000 * a))
x2 = int(round(x0 - 1000 * (-b)))
y2 = int(round(y0 - 1000 * a))
# 只选角度最小的作为旋转角度
sum += theta
cv2.line(lineimage, (x1, y1), (x2, y2), (0, 0, 255), 1, cv2.LINE_AA)
#cv2.imshow("Imagelines", lineimage)
# 对所有角度求平均,这样做旋转效果会更好
average = sum / len(lines)
res = DegreeTrans(average)
if res > 45:
angle = 90 + res
elif res < 45:
print(2)
angle = -90 + res
return angle
# 度数转换
def DegreeTrans(theta):
res = theta / np.pi * 180
print(res)
return res
# 逆时针旋转图像degree角度(原尺寸)
def rotateImage(src, degree):
# 旋转中心为图像中心
h, w = src.shape[:2]
# 计算二维旋转的仿射变换矩阵
# RotateMatrix = cv2.getRotationMatrix2D((w / 2.0, h / 2.0), degree, 1)
if 65 < abs(degree) < 90:
print(11)
RotateMatrix = cv2.getRotationMatrix2D((w / 2.0, h / 2.0), degree * (4/5), 1)
elif 0 < abs(degree) < 65:
print(12)
RotateMatrix = cv2.getRotationMatrix2D((w / 2.0, h / 2.0), degree/3, 1)
# 仿射变换,背景色填充为白色
rotate = cv2.warpAffine(src, RotateMatrix, (w, h), borderValue=(50, 46, 65))
return rotate
(二)Harris角点检测
这步十分简单易懂,在此不做过多赘述。
需要注意的是,在设置参数的过程中,我们需要遵守的原则是 “结果一定取到了四个角点,并且干扰点尽可能的少”
HarrisDetect(img)
def HarrisDetect(img):
# 转换成灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 高斯模糊
gray = cv2.GaussianBlur(gray, (7, 7), 0)
# 图像转换为float32
gray = np.float32(gray)
# harris角点检测
dst = cv2.cornerHarris(gray, 2, 3, 0.02)
# 阈值设定
img[dst > 0.0001*dst.max()] = [225, 0, 0]
cv2.imshow('Harris', img)
return img
(三)利用掩模限制角点结果分布
为什么这样做?
可以看到,上图中虽然求出了许多角点,但有许多是“废点”。
我把废点分为两种:
① 在票据轮廓之外的点
② 在票据轮廓之内的点
基于此,本步骤就是用来剔除第一种废点,即票据轮廓之外的点。这将为我们后面的操作提供了便利性,也是必不可少的。
值得一提的是,创建蒙版的过程,其实就是根据阈值对进行二值化。
其中,灰度化以后,我们用蓝色标出的角点就变成了灰度值很小的点,导致在二值化的过程中,他们并不能被有效变“1”。(因为四个顶点的灰度值和我们标出的废点的灰度值肯定是一样的,因此如果我们保留四个顶点的灰度值,就意味着保留这些废点的灰度值。)
但只要我们对求出的模板做适当的腐蚀操作,这些噪点就会被腐蚀掉。
看图吧
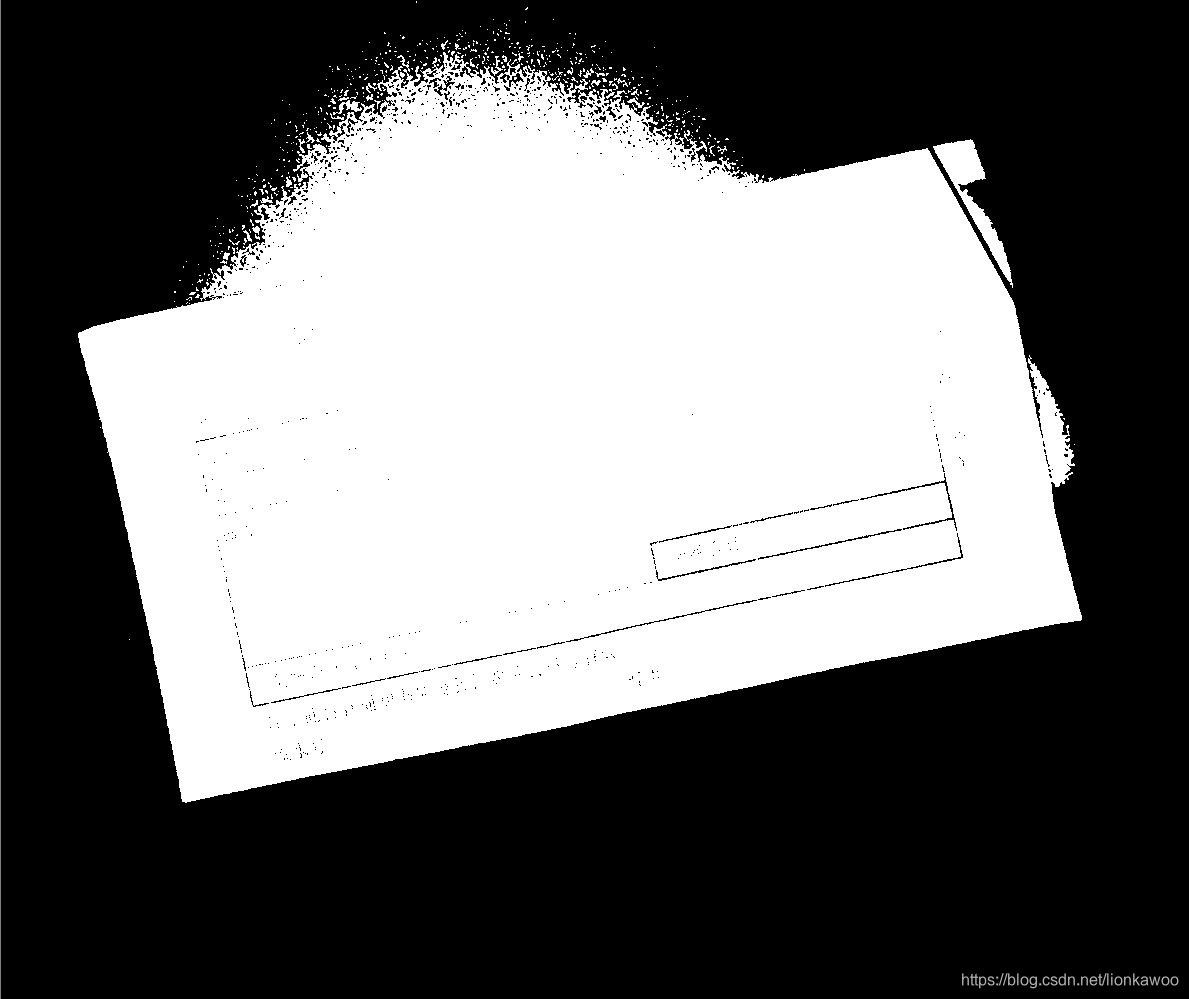
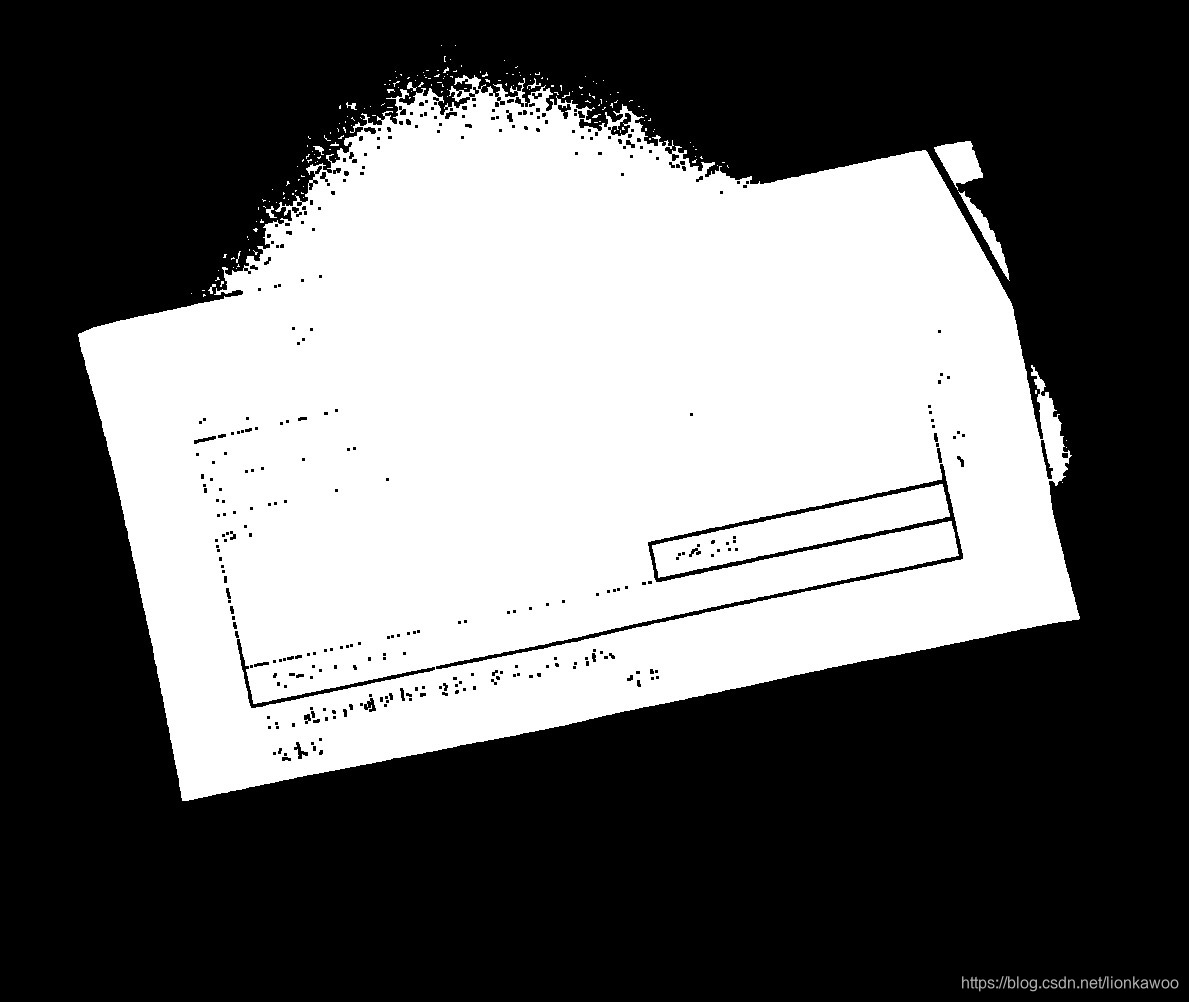
可以看到变化吗~
getMask(img, Harris_img)
def getMask(img, Harris_img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 利用阈值,创造一个蒙版
ret, mask = cv2.threshold(gray, 100, 255, cv2.THRESH_BINARY)
# 腐蚀蒙版,去掉噪点部分
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
mask = cv2.erode(mask, kernel)
mask_inv = cv2.bitwise_not(mask)
# 对二进制取与
img1_bg = cv2.bitwise_and(img, img, mask=mask_inv)
img2_fg = cv2.bitwise_and(Harris_img, Harris_img, mask=mask)
dst = cv2.add(img1_bg, img2_fg)
cv2.imshow('mask', mask)
cv2.imshow('mask_result', dst)
return dst
(四)求四个角点,标出,连线
参考资料: [图像处理]边缘提取以及Harris角点检测1
局限性分析
在这里,我利用了嵌套for循环遍历了图像所有的点,并且对for循环的起始值和终止值做了约束。目的有二:
① 减少计算量
② 去除第二种废点,即票据轮廓内的废点
这也造成一个缺陷,因为for循环的起始值和终止值并不是自由的,为了让顶点能够被检测到,我们在校正的时候,应该确保四个角都分别能被for循环检测到。
从几何意义上说,这意味着四个顶点应该分别分布于这四个色块

pointDetect(mask, imgCopy)
def pointDetect(Harris_img, img):
# 求图像大小
shape = img.shape
height = shape[0]
width = shape[1]
upLeftX = 0
upLeftY = 0
downLeftX = 0
downLeftY = 0
upRightX = 0
upRightY = 0
downRightX = 0
downRightY = 0
# 求左上顶点
for i in range(0, round(width/2)):
for j in range(0, round(height/2)):
if upLeftX == 0 and upLeftY == 0 and Harris_img[j][i][0] == 225:
upLeftX = i
upLeftY = j
break
if upLeftX or upLeftY:
break
# 求右上顶点
for i in range(width-1, (round(width * (3/4))), -1):
for j in range(0, round(height/6)):
if upRightX == 0 and upRightY == 0 and Harris_img[j][i][0] == 225:
upRightX = i
upRightY = j
break
if upRightX or upRightY:
break
# 求左下顶点
for j in range(height-1, round(height/2), -1):
for i in range(0, round(width/2)):
if downLeftX == 0 and downLeftY == 0 and Harris_img[j][i][0] == 225:
downLeftX = i
downLeftY = j
break
if downLeftX or downLeftY:
break
# 求右下顶点
for i in range(width-1, round(width/2), -1):
for j in range(round(height/2), height-1,):
if downRightX == 0 and downRightY == 0 and Harris_img[j][i][0] == 225:
downRightX = i
downRightY = j
break
if downRightY or downRightY:
break
img[upLeftY][upLeftX][0] = 0
img[upLeftY][upLeftX][1] = 255
img[upLeftY][upLeftX][2] = 0
print("左上坐标:", upLeftY, upLeftX)
img[upRightY][upRightX][0] = 0
img[upRightY][upRightX][1] = 255
img[upRightY][upRightX][2] = 0
print("右上坐标:", upRightY, upRightX)
img[downRightY][downRightX][0] = 0
img[downRightY][downRightX][1] = 255
img[downRightY][downRightX][2] = 0
print("右下坐标:", downRightY, downRightX)
img[downLeftY][downLeftX][0] = 0
img[downLeftY][downLeftX][1] = 255
img[downLeftY][downLeftX][2] = 0
print("左下坐标:", downLeftY, downLeftX)
# 图像膨胀,让点更明显
img = cv2.dilate(img, None)
# 描边
cv2.line(img, (upLeftX, upLeftY), (upRightX, upRightY), (255, 0, 0), 1)
cv2.line(img, (upRightX, upRightY), (downRightX, downRightY), (255, 0, 0), 1)
cv2.line(img, (downRightX, downRightY), (downLeftX, downLeftY), (255, 0, 0), 1)
cv2.line(img, (downLeftX, downLeftY), (upLeftX, upLeftY), (255, 0, 0), 1)
cv2.imshow('result', img)
完整代码
import cv2
import numpy as np
# Harris角点
def HarrisDetect(img):
# 转换成灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 高斯模糊
gray = cv2.GaussianBlur(gray, (7, 7), 0)
# 图像转换为float32
gray = np.float32(gray)
# harris角点检测
dst = cv2.cornerHarris(gray, 2, 3, 0.02)
# 图像膨胀
# dst = cv2.dilate(dst, None)
# 图像腐蚀
# dst = cv2.erode(dst, None)
# 阈值设定
img[dst > 0.0001*dst.max()] = [225, 0, 0]
cv2.imshow('Harris', img)
return img
# 求顶点
def pointDetect(Harris_img, img):
# 求图像大小
shape = img.shape
height = shape[0]
width = shape[1]
upLeftX = 0
upLeftY = 0
downLeftX = 0
downLeftY = 0
upRightX = 0
upRightY = 0
downRightX = 0
downRightY = 0
# 求左上顶点
for i in range(0, round(width/2)):
for j in range(0, round(height/2)):
if upLeftX == 0 and upLeftY == 0 and Harris_img[j][i][0] == 225:
upLeftX = i
upLeftY = j
break
if upLeftX or upLeftY:
break
# 求右上顶点
for i in range(width-1, (round(width * (3/4))), -1):
for j in range(0, round(height/6)):
if upRightX == 0 and upRightY == 0 and Harris_img[j][i][0] == 225:
upRightX = i
upRightY = j
break
if upRightX or upRightY:
break
# 求左下顶点
for j in range(height-1, round(height/2), -1):
for i in range(0, round(width/2)):
if downLeftX == 0 and downLeftY == 0 and Harris_img[j][i][0] == 225:
downLeftX = i
downLeftY = j
break
if downLeftX or downLeftY:
break
# 求右下顶点
for i in range(width-1, round(width/2), -1):
for j in range(round(height/2), height-1,):
if downRightX == 0 and downRightY == 0 and Harris_img[j][i][0] == 225:
downRightX = i
downRightY = j
break
if downRightY or downRightY:
break
img[upLeftY][upLeftX][0] = 0
img[upLeftY][upLeftX][1] = 255
img[upLeftY][upLeftX][2] = 0
print("左上坐标:", upLeftY, upLeftX)
img[upRightY][upRightX][0] = 0
img[upRightY][upRightX][1] = 255
img[upRightY][upRightX][2] = 0
print("右上坐标:", upRightY, upRightX)
img[downRightY][downRightX][0] = 0
img[downRightY][downRightX][1] = 255
img[downRightY][downRightX][2] = 0
print("右下坐标:", downRightY, downRightX)
img[downLeftY][downLeftX][0] = 0
img[downLeftY][downLeftX][1] = 255
img[downLeftY][downLeftX][2] = 0
print("左下坐标:", downLeftY, downLeftX)
# 图像膨胀
img = cv2.dilate(img, None)
# 描边
cv2.line(img, (upLeftX, upLeftY), (upRightX, upRightY), (255, 0, 0), 1)
cv2.line(img, (upRightX, upRightY), (downRightX, downRightY), (255, 0, 0), 1)
cv2.line(img, (downRightX, downRightY), (downLeftX, downLeftY), (255, 0, 0), 1)
cv2.line(img, (downLeftX, downLeftY), (upLeftX, upLeftY), (255, 0, 0), 1)
cv2.imshow('result', img)
# 利用绝对中位差排除异常Theta
def getMAD(s):
median = np.median(s)
# 这里的b为波动范围
b = 1.4826
mad = b * np.median(np.abs(s-median))
# 确定一个值,用来排除异常值范围
lower_limit = median - (3*mad)
upper_limit = median + (3*mad)
# print(mad, lower_limit, upper_limit)
return lower_limit, upper_limit
# 通过霍夫变换计算角度
def CalcDegree(srcImage):
midImage = cv2.cvtColor(srcImage, cv2.COLOR_BGR2GRAY)
dstImage = cv2.Canny(midImage, 50, 200, 3)
lineimage = srcImage.copy()
# 通过霍夫变换检测直线
# 第4个参数为阈值,阈值越大,检测精度越高
lines = cv2.HoughLines(dstImage, 1, np.pi / 180, 200)
# 由于图像不同,阈值不好设定,因为阈值设定过高导致无法检测直线,阈值过低直线太多,速度很慢
sum = 0
# 绝对中位差排除异常值
thetaList = []
for i in range(len(lines)):
for rho, theta in lines[i]:
thetaList.append(theta)
#print(thetaList)
lower_limit, upper_limit = getMAD(thetaList)
# 判断是否需要旋转操作
thetaavg_List = []
for i in range(len(lines)):
for rho, theta in lines[i]:
if lower_limit <= theta <= upper_limit:
thetaavg_List.append(theta)
thetaAvg = np.mean(thetaavg_List)
#print(thetaAvg)
deviation = 0.01
if (np.pi/2-deviation <= thetaAvg <= np.pi/2+deviation) or (0 <= thetaAvg <= deviation) or (np.pi-deviation <= thetaAvg <= 180):
angle = 0
else:
# 依次画出每条线段
for i in range(len(lines)):
for rho, theta in lines[i]:
if lower_limit <= theta <= upper_limit:
#print("theta:", theta, " rho:", rho)
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(round(x0 + 1000 * (-b)))
y1 = int(round(y0 + 1000 * a))
x2 = int(round(x0 - 1000 * (-b)))
y2 = int(round(y0 - 1000 * a))
# 只选角度最小的作为旋转角度
sum += theta
cv2.line(lineimage, (x1, y1), (x2, y2), (0, 0, 255), 1, cv2.LINE_AA)
cv2.imshow("Imagelines", lineimage)
# 对所有角度求平均,这样做旋转效果会更好
average = sum / len(lines)
res = DegreeTrans(average)
if res > 45:
angle = 90 + res
elif res < 45:
print(2)
angle = -90 + res
return angle
# 度数转换
def DegreeTrans(theta):
res = theta / np.pi * 180
print(res)
return res
# 逆时针旋转图像degree角度(原尺寸)
def rotateImage(src, degree):
# 旋转中心为图像中心
h, w = src.shape[:2]
# 计算二维旋转的仿射变换矩阵
# RotateMatrix = cv2.getRotationMatrix2D((w / 2.0, h / 2.0), degree, 1)
if 65 < abs(degree) < 90:
print(11)
RotateMatrix = cv2.getRotationMatrix2D((w / 2.0, h / 2.0), degree * (4/5), 1)
elif 0 < abs(degree) < 65:
print(12)
RotateMatrix = cv2.getRotationMatrix2D((w / 2.0, h / 2.0), degree/3, 1)
# 仿射变换,背景色填充为白色
rotate = cv2.warpAffine(src, RotateMatrix, (w, h), borderValue=(50, 46, 65))
return rotate
# 利用掩模排除多余的点
def getMask(img, Harris_img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# gray = cv2.GaussianBlur(gray, (7, 7), 0)
ret, mask = cv2.threshold(gray, 100, 255, cv2.THRESH_BINARY)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
mask = cv2.erode(mask, kernel)
mask_inv = cv2.bitwise_not(mask)
img1_bg = cv2.bitwise_and(img, img, mask=mask_inv)
img2_fg = cv2.bitwise_and(Harris_img, Harris_img, mask=mask)
dst = cv2.add(img1_bg, img2_fg)
cv2.imshow('mask_result', dst)
return dst
# 导入图像
filename = 'ex0301.jpg'
# filename = 'ex0302.jpg'
# filename = 'ex0303.bmp'
img = cv2.imread(filename)
imgCopy = img.copy()
# 调整图像角度
degree = CalcDegree(img) # 求矩形主要方向与x轴的夹角degree
if degree != 0: # 若夹角不为0,则图像需要旋转
rotate = rotateImage(img, degree)
imgCopy = rotate.copy()
else: # 夹角很小时,可以不旋转
rotate = img.copy()
# Harris角点检测
Harris_img = HarrisDetect(rotate)
# 求掩模,提出距离票据太远的点
mask = getMask(imgCopy, Harris_img)
# 求四个角点,标出
pointDetect(mask, imgCopy)
cv2.waitKey(0)
cv2.destroyAllWindows()
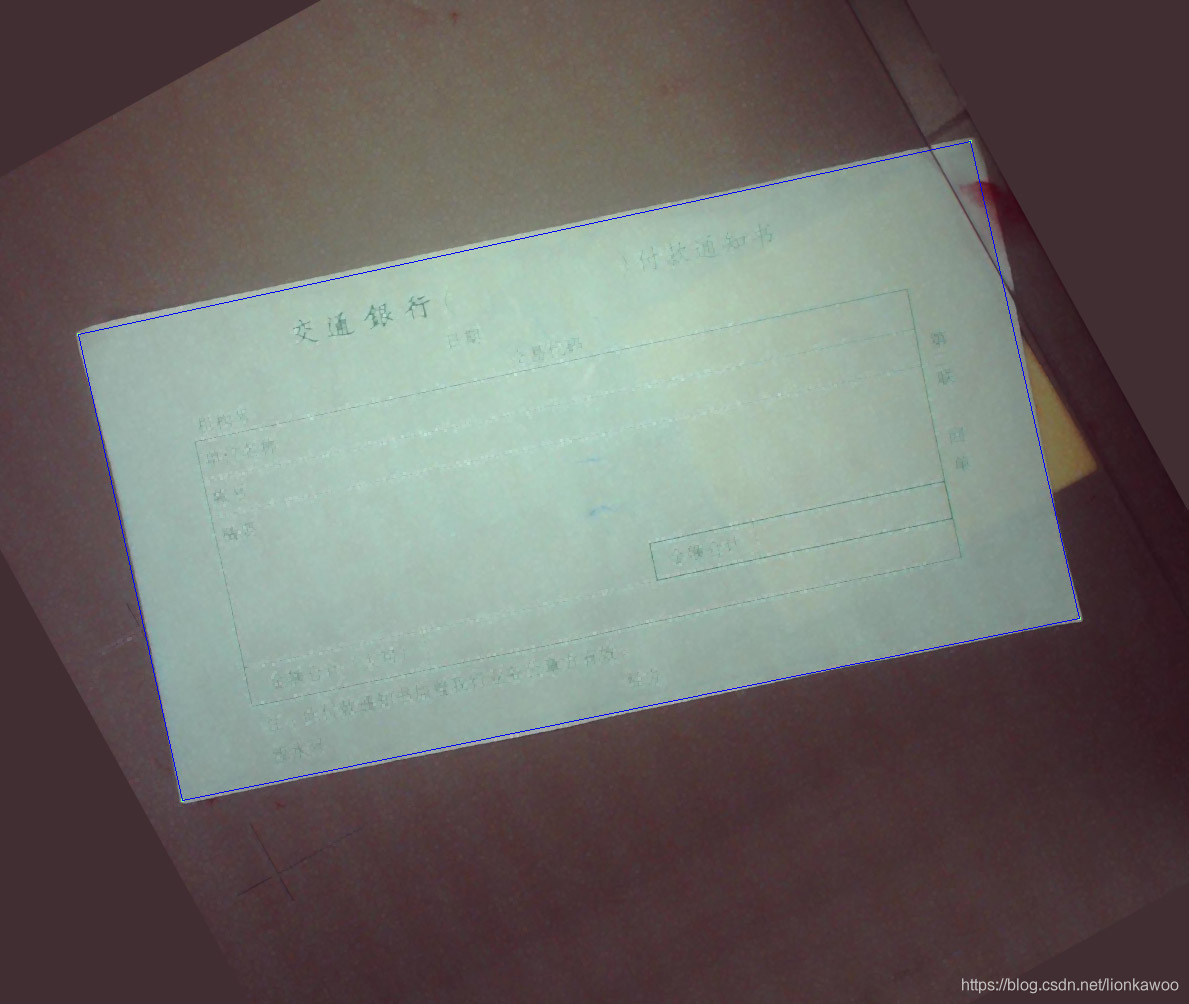
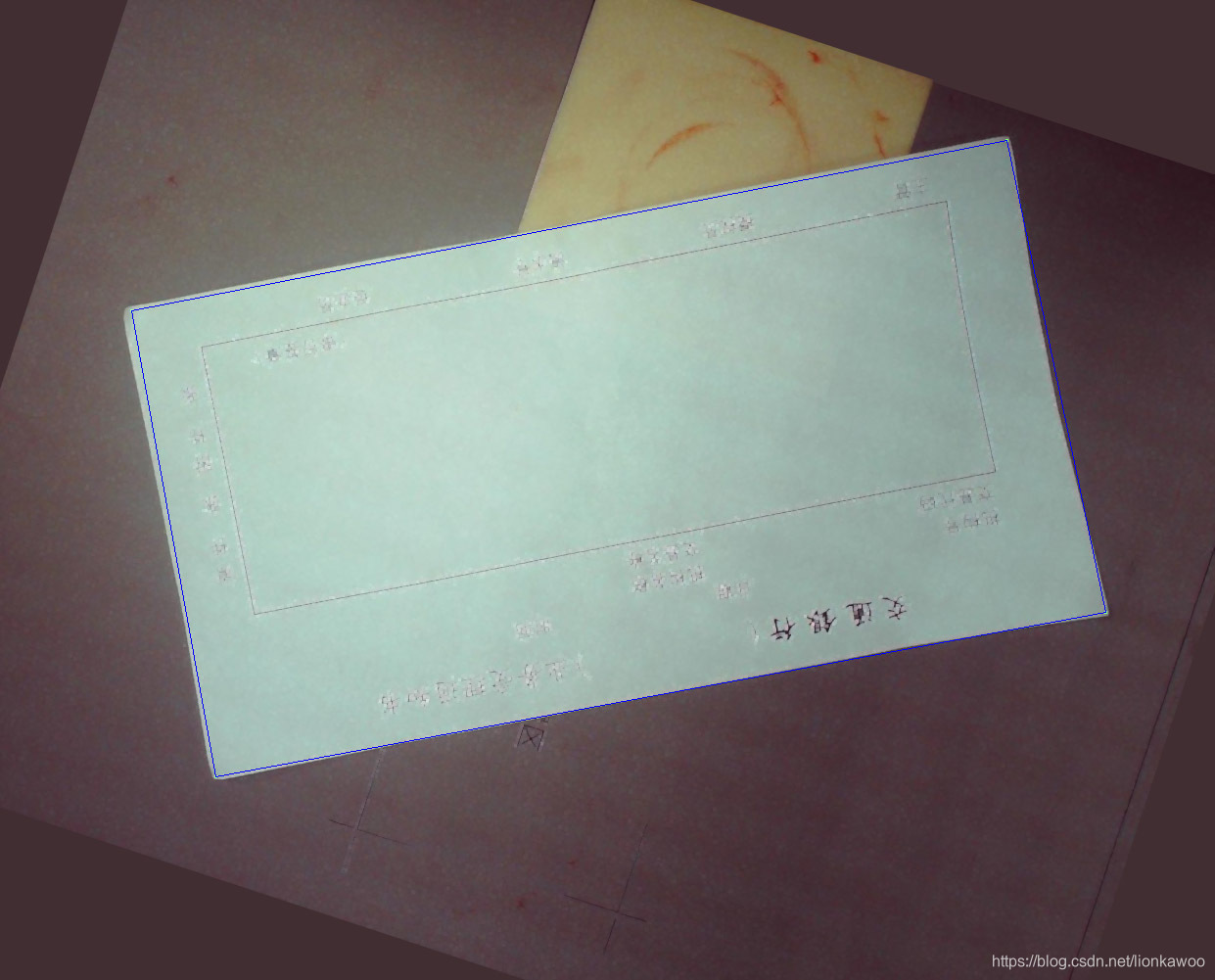
如果你想看结果可以直接点这里
点是绿色的~ 你看见了吗

局限性总结
- 本代码只能处理具有旋转变形的部分图像,不能处理其它变形;
- 我们称主轴和x轴的夹角为theta:本代码只能处理0°<theta<=90°的情况。
- 图像的四个顶点必须分别坐落在四个有色区域

在最后的最后,还是要强调一下我的代码的局限性。但正是为了不再写出有很多局限性的代码,所以才要不断学习鸭!