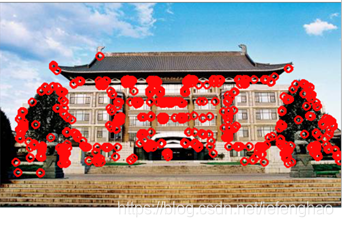
提取并标注特征点
使用Harris角点检测方法
原图


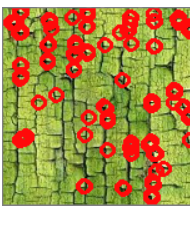
检测图
(1)初始化变量,dstImage为32位浮点数

(2)角点检测

(3)归一化

(4)进行标注
Harris检测
#include <iostream>
#include <opencv2/opencv.hpp>
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
using namespace std;
//-------------------------------------------------------------------------------
// CV&AR:Harris
// Auther: 1210
// Date:2019/03/21
//-------------------------------------------------------------------------------
Mat g_srcImage, g_srcImage1, g_grayImage;
int thresh = 30; //当前阈值
int max_thresh = 175; //最大阈值
void on_CornerHarris(int, void*);//回调函数
int main()
{
//载入原始图并进行克隆保存
g_srcImage = imread("bdlibrary.jpg", 1);
if (!g_srcImage.data) { printf("picture error!\n"); return false; }
imshow("src 1210", g_srcImage);
g_srcImage1 = g_srcImage.clone();
//转为灰度图
cvtColor(g_srcImage1, g_grayImage, COLOR_BGR2GRAY);
//调用函数,进行初始化
on_CornerHarris(0, 0);
waitKey(0);
return(0);
}
void on_CornerHarris(int, void*)
{
//定义局部变量
Mat dstImage;//目标图
Mat normImage;//归一化后的图
Mat scaledImage;//线性变换后的八位无符号整型的图
//清除上一次调用此函数时他们的值
dstImage = Mat::zeros(g_srcImage.size(), CV_32FC1);
g_srcImage1 = g_srcImage.clone();
//进行角点检测
cornerHarris(g_grayImage, dstImage, 2, 3, 0.04, BORDER_DEFAULT);
// 归一化与转换
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(normImage, scaledImage);//将归一化后的图线性变换成8位无符号整型
// 将检测到的,且符合阈值条件的角点绘制出来
for (int j = 0; j < normImage.rows; j++)
{
for (int i = 0; i < normImage.cols; i++)
{
if ((int)normImage.at<float>(j, i) > thresh + 80)
{
circle(g_srcImage1, Point(i, j), 5, Scalar(10, 10, 255), 2, 8, 0);
circle(scaledImage, Point(i, j), 5, Scalar(0, 10, 255), 2, 8, 0);
}
}
}
imshow("dst 1210", g_srcImage1);
//imshow("dst 1210", scaledImage);
}