写在前面:
黄宁然, 七月,骄阳似火。
参考文献镇楼:
[1]袁志聪,基于harris特征的点云配准方法研究
[2]高亭,基于改进Harris角点检测的印刷体文档图像检索技术
[3]景庆阳,基于harris角点检测的KCF算法研究.
[4]zoukankan,OpenCV计算机视觉学习(13)——图像特征点检测(Harris角点检测,sift算法),
[5] Harris角点检测原理【OpenCV教程】
[6] 勿在浮砂筑高台,【特征匹配】Harris及Shi-Tomasi原理及源码解析
注:csdn发文助手提示“外链过多”,故文献链接网址请见评论区。
问题来源:
笔者的执念。
1、原理简介
Harris算法是chris harris等提出的一种基于信号的点特征提取算法,是对Moravec算子的改良和优化[1]。Moravec算子主要是研究图像的固定窗口在四个不同方向上的移动,比较窗口中的像素灰度变化情况的大小,而harris角点检测则是比较窗口在任意方向滑动前后的灰度变化大小的情况,并且用数学表达式确定特征点的位置;同时引入了平滑因子,进一步增强了抗干扰能力[2]。若窗口移动前后,灰度发生了较大变化,则判断窗口中存在角点,否则窗口内不存在角点[1]。根据文献[3],具体公式推导如下。
当窗口的偏移量为[j,q]时,滑动前后窗口的灰度变化为:
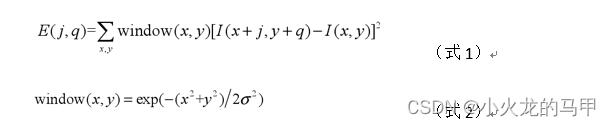
式中,Window(x,y)是用来滤波的高斯函数,I(x+j,y+q)为移动后的图像灰度,I(x,y)为原始图像灰度。
根据泰勒公式,二次展开为:

则式(1)变换为:

其中,Ix、Iy分别为x、y方向上的偏导数
可将式(4)简写成:

其中
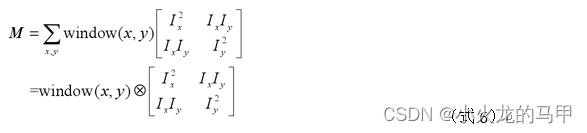
矩阵M也可以进一步写成:

其中,A、B、C分别是 I x 2 I_x^2 Ix2、 I y 2 I_y^2 Iy2、 I x y I_xy Ixy 在窗口w内的求和,即:

上述就得到自相关函数的表达式。据文献4,这是一椭圆的矩阵表达形式(非标准椭圆),所以系数矩阵M的特征值与椭圆的半轴长短有关。而椭圆的半轴长短也影响到曲率,也即M的特征值会影响到自相关函数的变化快慢。如何影响?可看文献4的讲解(笔者数学不好,这里也是一知半解)。
根据文献4,对于一标准椭圆,其表达式为:

矩阵形式为:

则系数矩阵:

则特征值与半轴的关系为:
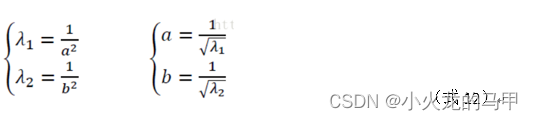
结论是:特征值大,半轴短。
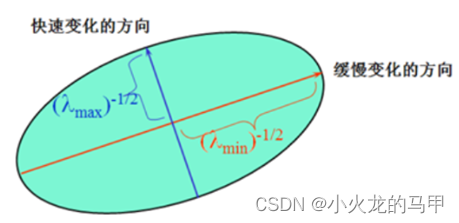
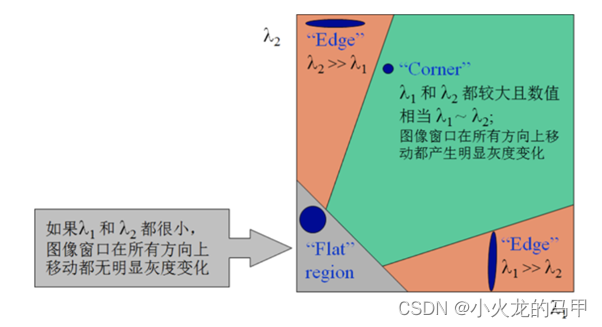
便得到边界、平面、角点几种情况下,特征值的大小情况:
(1)边界。一个特征值大,另一个特征值小,λ1 >> λ2 或者 λ2 >> λ1。自相关函数值在某一个方向上大,在其他方向上小。
(2)平面。两个特征值都小,且近似相等;自相关函数数值在各个方向上都小。
(3)角点。两个特征值都很大且近似相等,自相关函数在所有方向都增大。
实际中,Harris算法并不需要计算具体的特征值,而是根据角点响应值R来判断角点[2],R的定义为:

其中,detM为矩阵M的行列式,traceM为矩阵M的迹,k为Harris算子参数,据文献3,其一般取值为[0.04,0.06]。据文献5,角点响应值判断角点的依据如下:
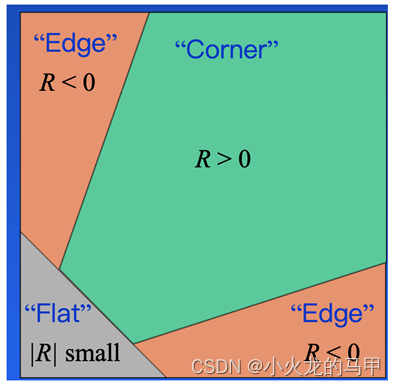
即:
(1)当R为大数值的正数时是角点
(2)当R为大数值的负数时是边界
(3)当R为小数是认为是平坦区域
综上,Harris 算法分以下几个步骤[2]:
(1)计算图像在水平方向和垂直方向的导数 I x Ix Ix 和 I y Iy Iy 以及 I x 2 I_x^2 Ix2、 I y 2 I_y^2 Iy2、 I x y I_xy Ixy 。
(2)根据式(8)对上述元素进行平滑滤波,以得到系数 A、B、C,得到M。
(3)将求得的系数带入式(13)~式(15),来计算角点响应值 R。
(4)对于各响应值R,若大于设定好的阈值,则该R对应的坐标即为角点。
2、python源码实现
参阅文献6,基于python自行编写代码实现harris角点检测。几点需要注意的地方:
(1)通过sobel算子,快速实现图像x、y方向上导数的求取;
(2)opencv在实现harris算子时,窗口函数并非取的高斯函数,而是普通的boxFilter函数(即权值均为1,且求和后,不归一化)。
引用库:
#coding=utf8
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
import matplotlib.cm as cm
import math
import cv2
import os,sys
import scipy.ndimage
import time
import scipy
harris角点检测代码:
```bash
def harris_corner_detect(img_src,block_size=2,aperture_size=3,k=0.04,borderType=cv2.BORDER_DEFAULT):
if img_src.dtype!=np.uint8:
raise ("input image shoud be uint8 type")
R_arr = np.zeros(img_src.shape,dtype=np.float32)#用来存储角点响应值
img = img_src.astype(np.float32)
scale = 1.0/( (aperture_size-1)*2*block_size*255 )#参考opencv实现源码,在sobel算子时乘以这个系数
#借助sobel算子,计算x、y方向上的偏导数
Ix = cv2.Sobel(img,-1,dx=1,dy=0,ksize=aperture_size,scale=scale,borderType=borderType)
Iy = cv2.Sobel(img,-1,dx=0,dy=1,ksize=aperture_size,scale=scale,borderType=borderType)
Ixx = Ix**2
Iyy = Iy**2
Ixy = Ix*Iy
#借助boxFilter函数,以block_size为窗口大小,对窗口内的数值求和,且不归一化
f_xx = cv2.boxFilter(Ixx,ddepth=-1,ksize=(block_size,block_size) ,anchor =(-1,-1),normalize=False, borderType=borderType)
f_yy = cv2.boxFilter(Iyy,ddepth=-1,ksize=(block_size,block_size),anchor =(-1,-1),normalize=False,borderType=borderType)
f_xy = cv2.boxFilter(Ixy, ddepth=-1,ksize=(block_size,block_size),anchor =(-1,-1),normalize=False,borderType=borderType)
# 也可以尝试手动求和
radius = int((block_size - 1) / 2) # 考虑blocksize为偶数的情况,奇数时,前、后的数量一样;为偶数时,后比前多一个
N_pre = radius
N_post = block_size - N_pre - 1
row_s, col_s = N_pre, N_pre
row_e, col_e = img.shape[0] - N_post, img.shape[1] - N_post
#开始计算每一个坐标下的响应值
for r in range(row_s,row_e):
for c in range(col_s,col_e):
#手动对窗口内的数值求和
#sum_xx = Ixx[r-N_pre:r+N_post+1,c-N_pre:c+N_post+1].sum()
#sum_yy = Iyy[r-N_pre:r+N_post+1,c-N_pre:c+N_post+1].sum()
#sum_xy = Ixy[r-N_pre:r+N_post+1,c-N_pre:c+N_post+1].sum()
#或者直接使用boxFilter的结果
sum_xx = f_xx[r,c]
sum_yy = f_yy[r, c]
sum_xy = f_xy[r, c]
#根据行列式和迹求响应值
det = (sum_xx * sum_yy) - (sum_xy ** 2)
trace = sum_xx + sum_yy
res = det - k * (trace ** 2)
# 或者用如下方式求行列式和迹
#M = np.array([[sum_xx,sum_xy],[sum_xy,sum_yy]])
#res = np.linalg.det(M) - (k * (np.trace(M))**2 )
R_arr[r,c] = res
return R_arr
主程序调用:
这里,响应值的门限选择为最大响应值得0.01倍。
if __name__ == '__main__':
img_src = cv2.imread('susan_input1.png',cv2.IMREAD_GRAYSCALE)
#source code
res_arr = harris_corner_detect(img_src,block_size=2,aperture_size=3,k=0.04)
max_v = np.max(res_arr)
res_arr[res_arr<0.01*max_v]=0
img_show = img_src.copy()
if(len(img_show.shape)==2):
img_show = cv2.cvtColor(img_show,cv2.COLOR_GRAY2BGR)
img_show[res_arr!=0] = (255,0,0)
print(len(np.where(res_arr!=0)[0]))
print(np.max(res_arr))
plt.figure()
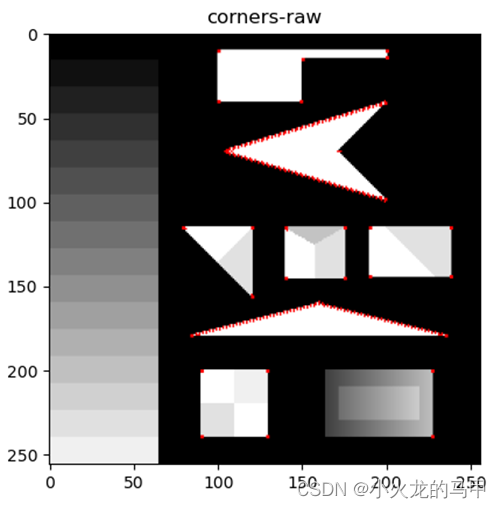
plt.title("corners-raw")
plt.imshow(img_show, cmap=cm.gray)
plt.show()
检测结果如下:
3、基于opencv实现
Opencv自带harris算子,可以直接求取响应矩阵。这里使用的opencv版本为3.4.2.16
调用方式为:
dst = cv2.cornerHarris(img_src,blockSize= 2,ksize= 3,k= 0.04)
主程序调用:
if __name__ == '__main__':
img_src = cv2.imread('susan_input1.png',cv2.IMREAD_GRAYSCALE)
#source code
res_arr = harris_corner_detect(img_src,block_size=2,aperture_size=3,k=0.04)
max_v = np.max(res_arr)
res_arr[res_arr<0.01*max_v]=0
img_show = img_src.copy()
if(len(img_show.shape)==2):
img_show = cv2.cvtColor(img_show,cv2.COLOR_GRAY2BGR)
img_show[res_arr!=0] = (255,0,0)
print(len(np.where(res_arr!=0)[0]))
print(np.max(res_arr))
plt.figure()
plt.title("corners-raw")
plt.imshow(img_show, cmap=cm.gray)
#opencv库函数调用
dst = cv2.cornerHarris(img_src,blockSize= 2,ksize= 3,k= 0.04) #blockSize为窗口大小,ksize为sobel算子的核大小,k为harris算子参数
img_show2 = img_src.copy()
if (len(img_show2.shape) == 2):
img_show2 = cv2.cvtColor(img_show2, cv2.COLOR_GRAY2BGR)
dst2 = dst.copy()
dst2[dst<= 0.01* dst.max()]=0
img_show2[dst2!=0] = (255, 0, 0)
print(len(np.where(dst2 != 0)[0]))
print(np.max(dst2))
plt.figure()
plt.title("opencv")
plt.imshow(img_show2, cmap=cm.gray)
plt.show()
opencv库函数检测结果如下:
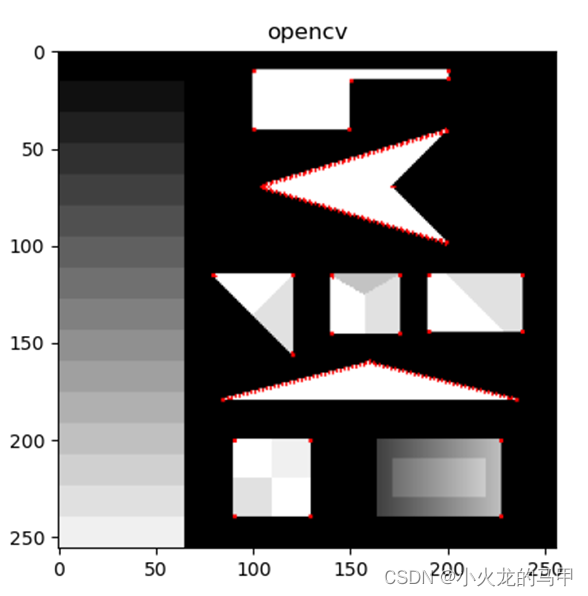
将自行编写的harris角点检测代码运行结果与opencv运行结果相对比,二者一致(仅仅比较了数量、最大值)。
4、非极大值抑制
可根据需要,执行非极大值抑制。
非极大值抑制代码:
def corner_nms(corner,kernal=3):
out = corner.copy()
row_s = int(kernal/2)
row_e = out.shape[0] - int(kernal/2)
col_s,col_e = int(kernal/2),out.shape[1] - int(kernal/2)
for r in range(row_s,row_e):
for c in range(col_s,col_e):
if corner[r,c]==0: #不是可能的角点
continue
zone = corner[r-int(kernal/2):r+int(kernal/2)+1,c-int(kernal/2):c+int(kernal/2)+1]
index = corner[r,c]<zone
(x,y) = np.where(index==True)
if len(x)>0 : #说明corner[r,c]不是最大,直接归零将其抑制
out[r,c] = 0
return out
在上文基础上,调用nms:
#nms
score_nms = corner_nms(res_arr)
img_show3 = cv2.cvtColor(img_src,cv2.COLOR_GRAY2BGR)
img_show3[score_nms != 0] = (255, 0, 0)
plt.figure()
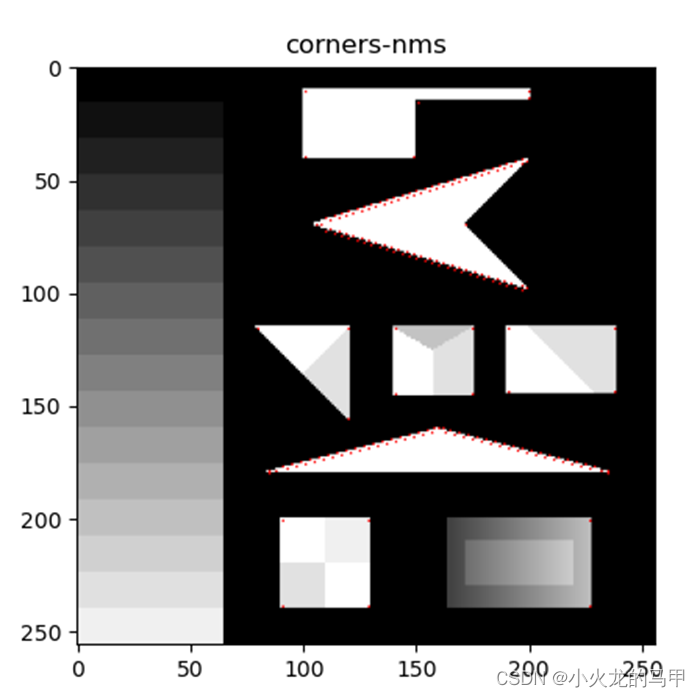
plt.title("corners-nms")
plt.imshow(img_show3, cmap=cm.gray)
plt.show()
经过nms抑制后的结果:
5、python源码下载
Python程序源码下载地址
https://download.csdn.net/download/xiaohuolong1827/85847444