本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

目录
- 《动手学机器人学》第一节:数学基础–矩阵
- 《动手学机器人学》第二节:MiniConda、JupyterNotebook与ROS2
- 《动手学机器人学》第三节:动手学数学基础,使用NumPy操作矩阵
- 《动手学机器人学》第四节(上):位姿描述
- 《动手学机器人学》第四节(下):一文搞懂坐标变换
- 《动手学机器人学》第五节(上):动手学空间姿态描述与变换
- 《动手学机器人学》第五节(中):使用ROS2的TF2进行坐标变换
- 《动手学机器人学》第五节(下):使用Python操作TF
- 更新中…欢迎关注小鱼公众号鱼香ROS,第一时间获取更新
正文
大家好,我是小鱼,上一节我们介绍了机器人学的基础——矩阵相关知识,秉持着学以至用的原则,小鱼准备带大家先用代码来实现下矩阵的创建以及矩阵的运算。
工欲善其事,必先利其器,如果是编写机器人相关算法,小鱼最为推荐的就是使用jupyter来和ros进行通信了。
所以本节课小鱼就带你一起安装好MiniConda,并在MiniConda中安装好jupyter并配置好ros2环境。
1.MiniConda与Jupyter介绍
1.1 MiniConda 介绍
Miniconda 是 Conda 的免费最小安装程序。
Conda是什么呢?
Conda是在Windows、macOS和Linux上运行的开源软件包管理系统和环境管理系统。Conda可以快速安装、运行和更新软件包及其依赖项。
所以相比于conda的大体积miniconda更加的小和易用。
1.2 Jupyter介绍
可以把jupyter理解为一个可以在网页运行python语言的工具。
jupyter提出了文学化编程的概念,让我们可以在单元格(cell)中,可以像写在笔记本上文章一样,随时写,随时运行,随时根据运行的结果来修改我们的代码,这样的交互式编程模式可以极大的提升我们编写代码的效率。
2.安装miniconda与jupyer
2.1 miniconda下载
- minconda下载地址:https://docs.conda.io/en/latest/miniconda.html
这里小鱼推荐选择Python3.8 Miniconda3 Linux 64-bit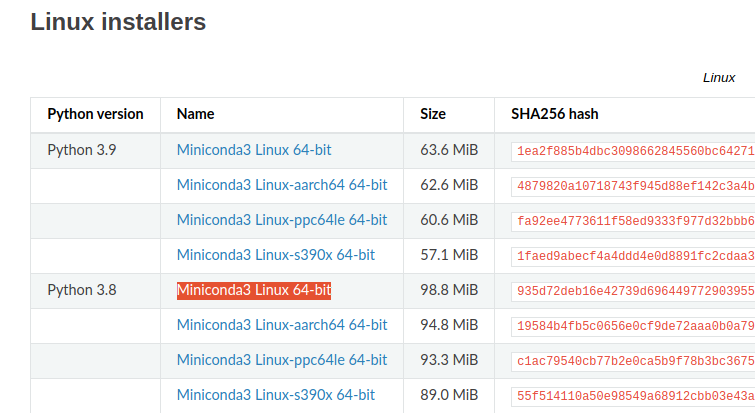
下载完成后你可以得到一个.sh的安装文件
2.2 miniconda安装
在安装目录文件夹空白处右击,在终端中打开,输入下面指令即可安装
bash Miniconda3-py38_4.10.3-Linux-x86_64.sh
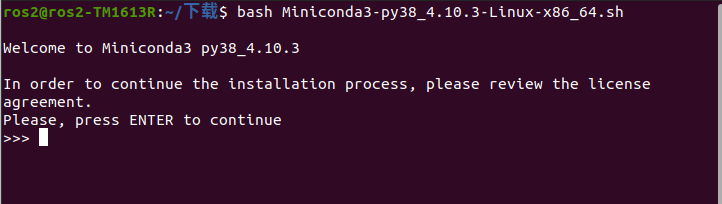
一路点enter,然后输入yes,回车即可完成安装,最后一步会提醒你是否要自动初始化环境,这里我们先选择yes。
没有选没事,跟着小鱼来一起初始化一次conda,打开终端输入下面的命令即可
cd ~/miniconda3/bin
./conda init
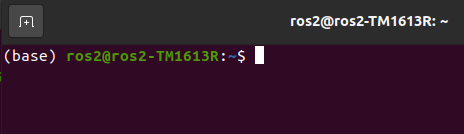
重启终端,你会发现你的终端前多了一个base,这代表你已经装好了conda。
如果想退出conda环境可以输入
conda deactivate
2.3 jupyter安装
方便起见,我们就在base环境下安装jupyter,使用的是清华大学源。
pip3 install jupyter -i https://pypi.tuna.tsinghua.edu.cn/simple
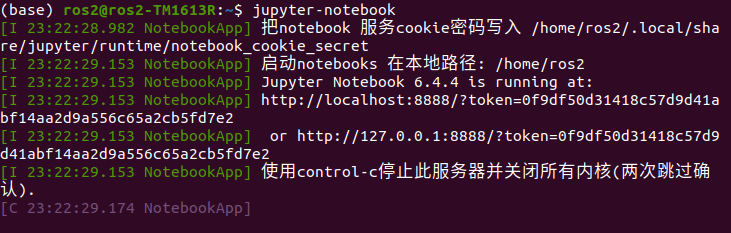
安装完成后,我们就可以使用下面的指令启动jupyter了,不出意外你的浏览器将要跳出来,然后自动打开conda页面。
jupyter-notebook
3.使用jupyter编写节点李四
接着小鱼带你一起使用jupyter来写ros2的代码。
3.1 新建Python3并编写第一行代码
点击新建Python3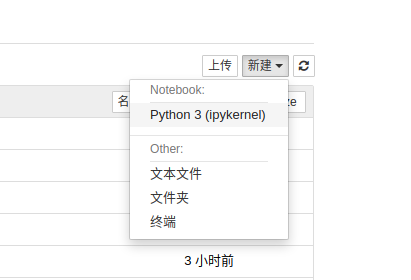
接着你可以看到一行行的单元格。
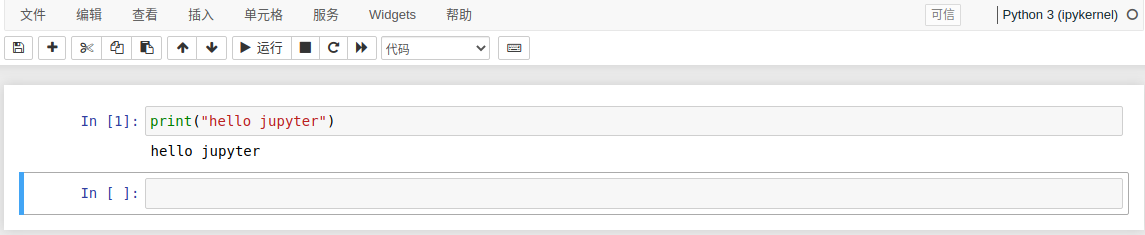
接着我们就可以在单元格里输入python代码,然后使用Shift+Enter来运行这行代码,比如我们可以试一试打印一句话
print("hello jupyter")
接着我们使用Shift+Enter来运行这行代码,可以看到这行代码的结果,随之展示在了该句打印的下方,我们可以修改打印的内容,然后重新使用Shift+Enter来运行,下面的数值也会随之改变。
3.2 编写ROS2代码
使用ros2无非是使用其rclpy客户端库,jupyter完美的支持了该库,一起和小鱼用import来导入吧。
第一行输入下面的指令,点击Shift+Enter可以看到没有任何报错,即导入成功了。
import rclpy
from rclpy.node import Node
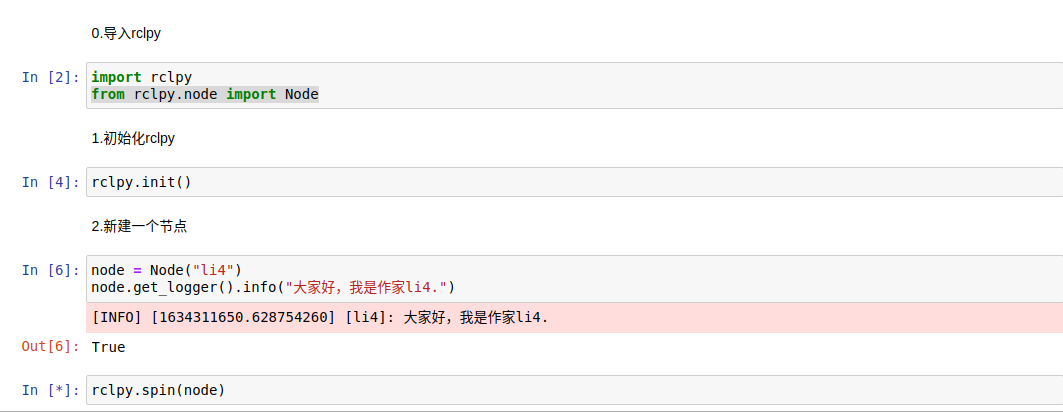
接着在和小鱼一起初始化客户端库,新建节点李四和spin节点吧,完整的代码如下:
import rclpy
from rclpy.node import Node
rclpy.init() # 初始化rclpy
node = Node("li4") # 新建一个节点
node.get_logger().info("大家好,我是作家li4.")
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
分步输入运行
注意这里我们没有调用shutdown,因为我们还不希望rclpy关掉。
3.3 测试
我们接下来用,ros2的命令行工具查看一下li4节点是否在线。
在jupyter中运行命令行和打开终端也是非常方便的,为了学习jupyter,我们使用jupyter自带的终端来运行ros2的指令。
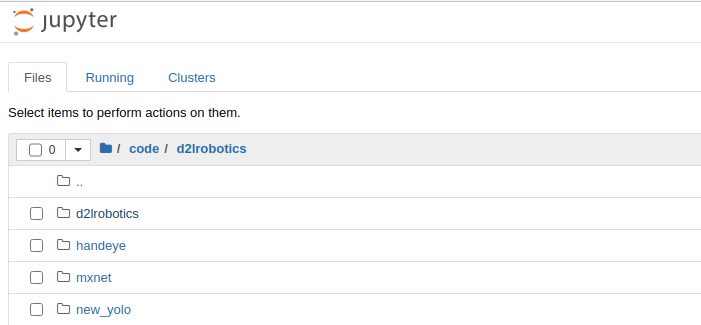
我们新建一个终端,回到文件夹目录视图,点击新建终端
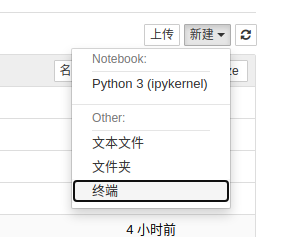
打开后的样子如下
在终端中输入
ros2 node list
可以看到李四已经出现了
4.总结
小鱼不能说吹爆jupyter,但用python和ros写算法调试程序,jupyter真的是非常的好用,还有更强大的画图功能等等,小鱼后面在机器人学学习课程中都会讲道,并且带大家一起熟悉jupyter与ros2的更多姿势。
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
- QQ交流群:139707339
- 版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划
作者介绍:
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小鱼,一起交流技术,学习机器人