2.1 Motivation
2.1.1 Introduction
How to track the uncertainty of estimating Dynamical Systems over time, using Kalman Filter to perform these estimates.
(1)Linear Dynamical Systems
(2)Maximum-A-Posterior Estimation
(3)Nonlinear Variations
2.1.2 Kalman Filter Motivation
This week we will learn about the Kalman Filter for Bayesian estimation in robotics.
Kalman Filter is an optimal tracking algorithm for linear systems.
2.2 Kalman Filter Model

Learn the dynamics system and measurement models that underlie the common filter.
The dynamics system describes how the state of the object change in time, as well as how the robot measures the state.
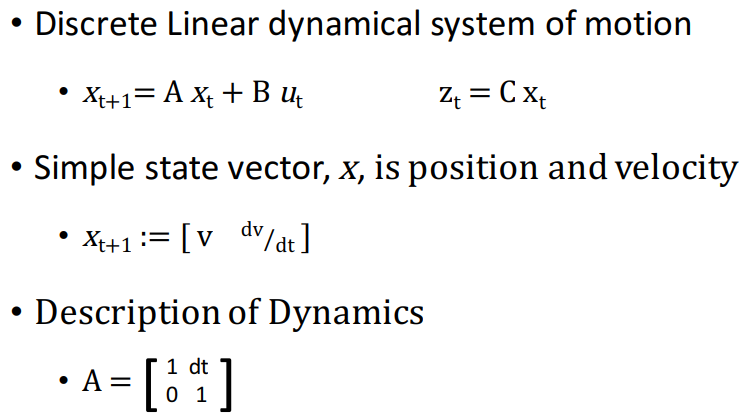
To provide an estimate that captures this uncertainty, we will transform this dynamical model into a set of probability expression.
Now given both the dynamics system model and the probabilistic model, we can combine these two ideas.
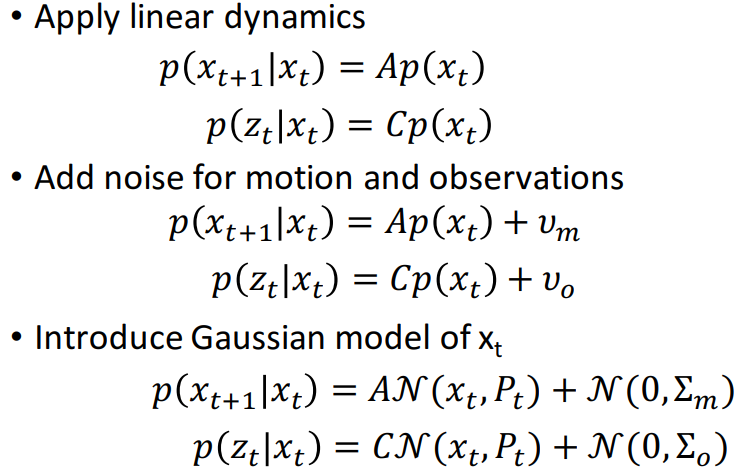
Applying the Gaussian probability distribution model, both the state and the noise are represented with means and variances.
