背景知识:为什么需要李代数
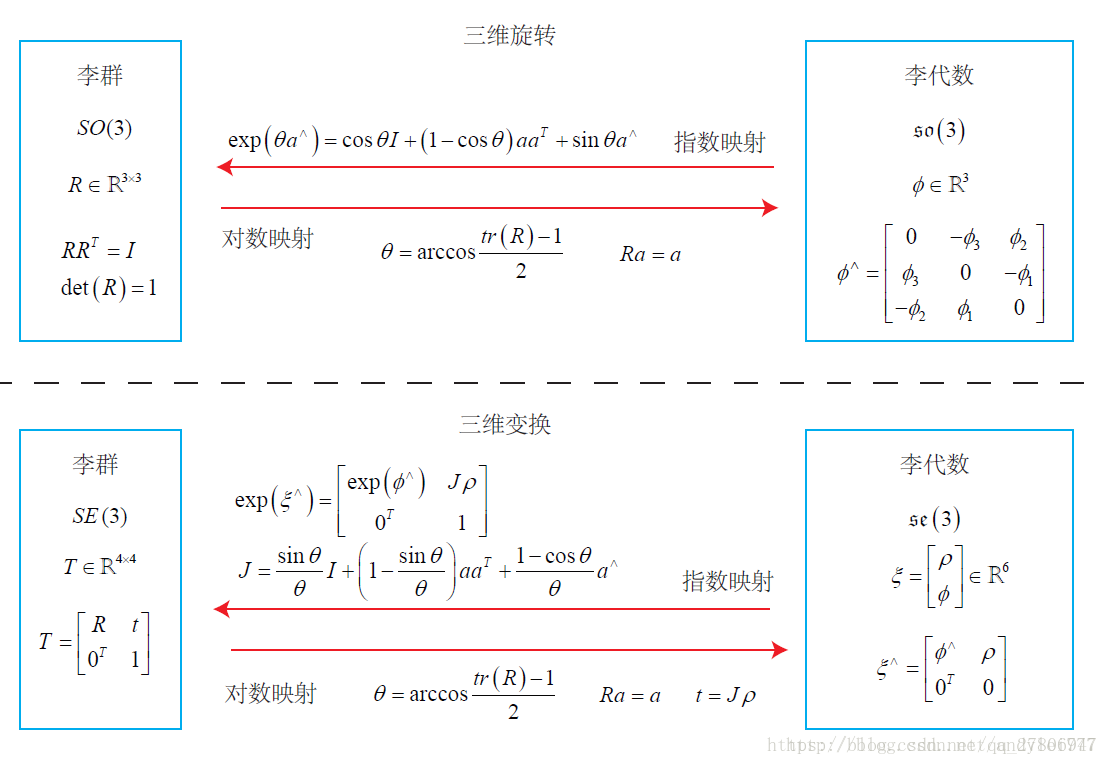
首先旋转矩阵是特殊正交群;而变换矩阵是特殊欧氏群;群是一种几何加上一种运算,而特殊正交群以及特殊欧氏群的运算时确是乘,不支持加法运算,因此在优化过程中,在求导上遇见了问题。
因而我们引入了李代数的概念(具体不再介绍,反正在优化的过程中需要把李群转换为李代数,进而进行求导和优化)。特殊正交群和特殊欧氏群的之间存在着一个指数映射的关系,并如下所示:
接下来,这里介绍对李代数求导的模型:
首先是BCH公式,为求导奠定理论基础,但同时需要知道,BCH是近似公式,存在着误差。
利用李代数求导的思路分为两种,第一种是使用李代数表示姿态,然后根据李代数的加法求导;另外一种是建立左扰动和右扰动模型。但第一种还是会涉及到雅可比矩阵的计算,太过于复杂,因而还是扰动模型应用较多。
对于扰动模型,有直接公式可以使用,不在介绍。
Sophus库的使用:库的使用就简单较多了。
#include <iostream>
#include <cmath>
using namespace std;
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "sophus/so3.h"
#include "sophus/se3.h"
int main( int argc, char** argv )
{
// 沿Z轴转90度的旋转矩阵
Eigen::Matrix3d R = Eigen::AngleAxisd(M_PI/2, Eigen::Vector3d(0,0,1)).toRotationMatrix();
Sophus::SO3 SO3_R(R); // Sophus::SO(3)可以直接从旋转矩阵构造
Sophus::SO3 SO3_v( 0, 0, M_PI/2 ); // 亦可从旋转向量构造
Eigen::Quaterniond q(R); // 或者四元数
Sophus::SO3 SO3_q( q );
// 上述表达方式都是等价的
// 输出SO(3)时,以so(3)形式输出
cout<<"SO(3) from matrix: "<<SO3_R<<endl;
cout<<"SO(3) from vector: "<<SO3_v<<endl;
cout<<"SO(3) from quaternion :"<<SO3_q<<endl;
// 使用对数映射获得它的李代数
Eigen::Vector3d so3 = SO3_R.log();
cout<<"so3 = "<<so3.transpose()<<endl;
// hat 为向量到反对称矩阵
cout<<"so3 hat=\n"<<Sophus::SO3::hat(so3)<<endl;
// 相对的,vee为反对称到向量
cout<<"so3 hat vee= "<<Sophus::SO3::vee( Sophus::SO3::hat(so3) ).transpose()<<endl; // transpose纯粹是为了输出美观一些
// 增量扰动模型的更新
Eigen::Vector3d update_so3(1e-4, 0, 0); //假设更新量为这么多
Sophus::SO3 SO3_updated = Sophus::SO3::exp(update_so3)*SO3_R;
cout<<"SO3 updated = "<<SO3_updated<<endl;
/********************萌萌的分割线*****************************/
cout<<"************我是分割线*************"<<endl;
// 对SE(3)操作大同小异
Eigen::Vector3d t(1,0,0); // 沿X轴平移1
Sophus::SE3 SE3_Rt(R, t); // 从R,t构造SE(3)
Sophus::SE3 SE3_qt(q,t); // 从q,t构造SE(3)
cout<<"SE3 from R,t= "<<endl<<SE3_Rt<<endl;
cout<<"SE3 from q,t= "<<endl<<SE3_qt<<endl;
// 李代数se(3) 是一个六维向量,方便起见先typedef一下
typedef Eigen::Matrix<double,6,1> Vector6d;
Vector6d se3 = SE3_Rt.log();
cout<<"se3 = "<<se3.transpose()<<endl;
// 观察输出,会发现在Sophus中,se(3)的平移在前,旋转在后.
// 同样的,有hat和vee两个算符
cout<<"se3 hat = "<<endl<<Sophus::SE3::hat(se3)<<endl;
cout<<"se3 hat vee = "<<Sophus::SE3::vee( Sophus::SE3::hat(se3) ).transpose()<<endl;
// 最后,演示一下更新
Vector6d update_se3; //更新量
update_se3.setZero();
update_se3(0,0) = 1e-4d; //对应与行和列的索引()
Sophus::SE3 SE3_updated = Sophus::SE3::exp(update_se3)*SE3_Rt;
cout<<"SE3 updated = "<<endl<<SE3_updated.matrix()<<endl;
return 0;
}
CMakeLists.txt文件如下:
cmake_minimum_required( VERSION 2.8 )
project( useSophus )
# 为使用 sophus,您需要使用find_package命令找到它
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
add_executable( useSophus useSophus.cpp )
target_link_libraries( useSophus ${Sophus_LIBRARIES} )
测试结果如下:
