视觉SLAM14讲----ch4的操作及避坑
一、ch4的实践的准备工作
- 确保已经有Sophus库,Sophus库是一个较好的李代数库。
注意: 开始时slambook2文件夹下的3rdparty文件夹里面的内容为空,还需要在终端输入:
cd slambook2/
git submodule update --init --recursive
说明: Sophus库支持SO(3)、SE(3)、SO(2)、SE(2)及变换Sim(3);时在Eigen基础上开发的,不需要安装额外的依赖库。
- 先安装依赖环境,终端输入:
sudo apt-get install libglew-dev libboost-dev libboost-thread-dev libboost-filesystem-dev libpython3.8-dev python3-pip
- 在slambook2/3rdparty/Sophus文件夹下打开终端并输入:
mkdir build
cd build/
cmake ..
make -j4
sudo make install
- 在终端中进入ch4文件夹下,顺序执行以下命令进行编译。
mkdir build
cd build
cmake ..
//注意,j4还是其他主要看自己的电脑情况
make -j4
- 在build文件中执行。
二、各个实践操作
1. Sophus的基本使用方法
在build文件中执行 ./useSophus,结果如下所示:
SO(3) from matrix:
2.22045e-16 -1 0
1 2.22045e-16 0
0 0 1
SO(3) from quaternion:
2.22045e-16 -1 0
1 2.22045e-16 0
0 0 1
they are equal
so3 = 0 0 1.5708
so3 hat=
0 -1.5708 0
1.5708 0 -0
-0 0 0
so3 hat vee= 0 0 1.5708
SO3 updated =
0 -1 0
1 0 -0.0001
0.0001 2.03288e-20 1
*******************************
SE3 from R,t=
2.22045e-16 -1 0 1
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
SE3 from q,t=
2.22045e-16 -1 0 1
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
se3 = 0.785398 -0.785398 0 0 0 1.5708
se3 hat =
0 -1.5708 0 0.785398
1.5708 0 -0 -0.785398
-0 0 0 0
0 0 0 0
se3 hat vee = 0.785398 -0.785398 0 0 0 1.5708
SE3 updated =
2.22045e-16 -1 0 1.0001
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
2. 例子:评估轨迹误差
在build中进入 examples,执行 ./trajectoryError后,结果如下:
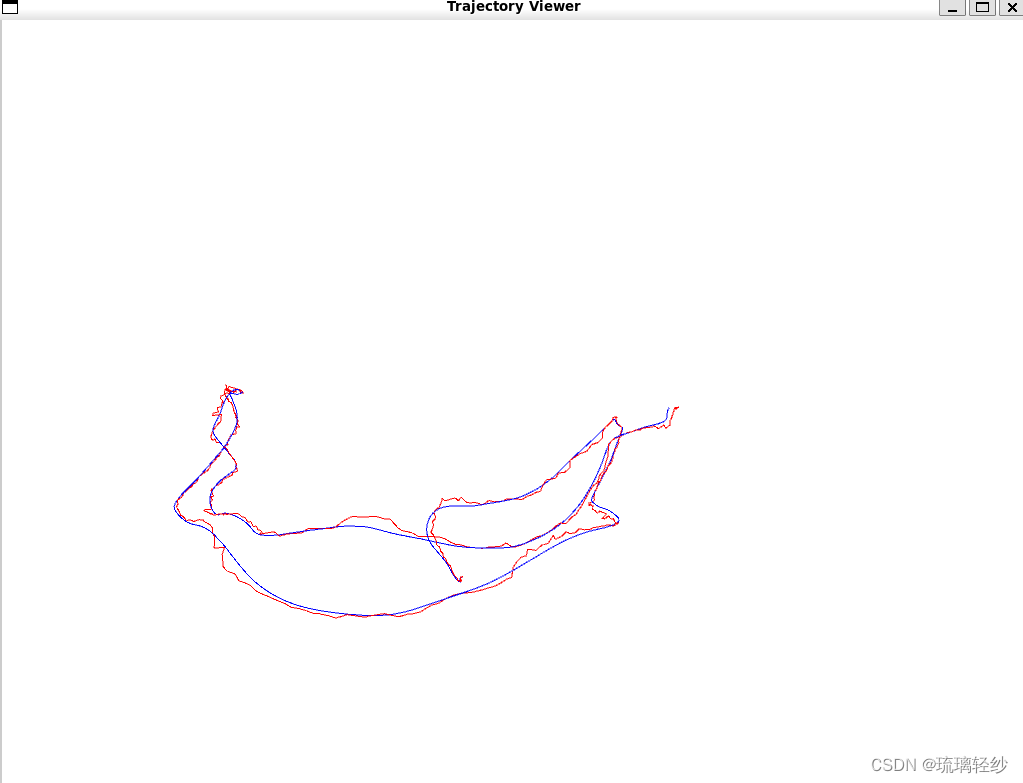
同时终端会输出:RMSE = 2.20728
三、遇到的问题
- 问题:在安装Sophus,出现问题。
解决办法: 需要在CMakeLists.txt文件中添加以下内容,注意,添加到第30行刚好。如果是添加到14行前或者最后,问题不会被解决。
set(CMAKE_CXX_FLAGS"-Wno-error=deprecated-declarations-Wno-deprecated-declarations ")
最后再安装软件包:
sudo make install
- 在执行./trajectoryError出现如下提示:
trajectory ./example/groundtruth.txt not found.
trajectory ./example/estimated.txt not found.
trajectoryError: /home/fighter/slam/slambook2/ch4/example/trajectoryError.cpp:22: int main(int, char**): Assertion `!groundtruth.empty() && !estimated.empty()' failed.
Aborted
解决办法: 更改trajectoryError.cpp文件的第10行和11行:
//改之前
string groundtruth_file = "./example/groundtruth.txt";
string estimated_file = "./example/estimated.txt";
//改之后
string groundtruth_file = "/home/fighter/slam/slambook2/ch4/example/groundtruth.txt";
string estimated_file = "/home/fighter/slam/slambook2/ch4/example/estimated.txt";
记得改完之后需要重新在build中执行make进行编译。
原因:主要是因为找不到文件导致,这里为了避免更多的问题和麻烦出现,建议直接改为绝对路径。