1、Camera projection models
MVS algorithms require that every input image has a orresponding camera model that fully describes how to project a 3D point in the world into a 2D pixel location in a particular image. The most commonly used camera model for MVS is the pinhole camera model, which is fully explained by a 3x4 projection camera matrix [88], defined up to a scale. This is the model commonly used with off-the-shelf digital cameras capturing still photographs.
Any 3×4 projection matrix P can be decomposed into the product of a 3×3 upper triangular
matrix K and a 3 × 4 pose matrix [R|T]
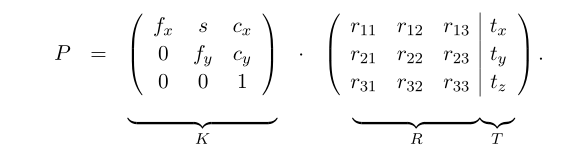
The matrix K is commonly referred to as the intrinsics matrix, because it is composed of quantities intrinsic to the camera: vertical and hor-izontal focal lengths (fx,fy), principal point (cx,cy), and skew s. The matrix [R|T] is commonly known as the extrinsics matrix, where R is the rotation of the camera and T is the translation of the camera. Note that, due to the quality of digital sensors, one rarely estimates the 11 parameters of the projection matrix. In particular, pixels are assumed to have no skew (s = 0), and be square (fx= fy). Also, if an image has not been cropped, it is safe to assume the principal point is at the center of the image. As a result, a common pinhole camera model is just composed of 7 parameters: the focal length f(1), the rotation matrix R(3) and the translation vector T(3)


https://blog.csdn.net/u011620352/article/details/51649399 相机模型
https://blog.csdn.net/lsh_2013/article/details/47615309 相机模型详解