转载于博客
http://blog.csdn.net/cv_family_z/article/details/50328175
http://blog.csdn.net/u014114990/article/details/50505331
CVPR2016
https://github.com/KaimingHe/deep-residual-networks
这是微软方面的最新研究成果, 在第六届ImageNet年度图像识别测试中,微软研究院的计算机图像识别系统在几个类别的测试中获得第一名。
本文是解决超深度CNN网络训练问题,152层及尝试了1000层。
随着CNN网络的发展,尤其的VGG网络的提出,大家发现网络的层数是一个关键因素,貌似越深的网络效果越好。但是随着网络层数的增加,问题也随之而来。
首先一个问题是 vanishing/exploding gradients,即梯度的消失或发散。这就导致训练难以收敛。但是随着 normalized initialization [23, 9, 37, 13] and intermediate normalization layers[16]的提出,解决了这个问题。
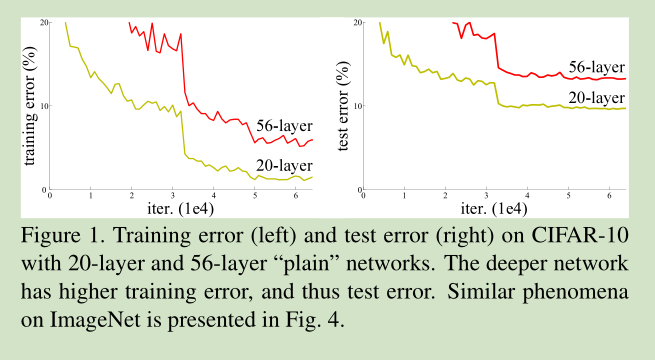
当收敛问题解决后,又一个问题暴露出来:随着网络深度的增加,系统精度得到饱和之后,迅速的下滑。让人意外的是这个性能下降不是过拟合导致的。如文献 [11, 42]指出,对一个合适深度的模型加入额外的层数导致训练误差变大。如下图所示:
如果我们加入额外的 层只是一个 identity mapping,那么随着深度的增加,训练误差并没有随之增加。所以我们认为可能存在另一种构建方法,随着深度的增加,训练误差不会增加,只是我们没有找到该方法而已。
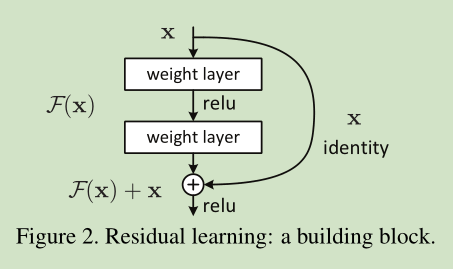
这里我们提出一个 deep residual learning 框架来解决这种因为深度增加而导致性能下降问题。 假设我们期望的网络层关系映射为 H(x), 我们让 the stacked nonlinear layers 拟合另一个映射, F(x):= H(x)-x , 那么原先的映射就是 F(x)+x。 这里我们假设优化残差映射F(x) 比优化原来的映射 H(x)容易。
F(x)+x 可以通过shortcut connections 来实现,如下图所示:
2 Related Work
Residual Representations
以前关于残差表示的文献表明,问题的重新表示或预处理会简化问题的优化。 These methods suggest that a good reformulation or preconditioning can simplify the optimization
Shortcut Connections
CNN网络以前对shortcut connections 也有所应用。
3 Deep Residual Learning
3.1. Residual Learning
这里我们首先求取残差映射 F(x):= H(x)-x,那么原先的映射就是 F(x)+x。尽管这两个映射应该都可以近似理论真值映射 the desired functions (as hypothesized),但是它俩的学习难度是不一样的。
这种改写启发于 图1中性能退化问题违反直觉的现象。正如前言所说,如果增加的层数可以构建为一个 identity mappings,那么增加层数后的网络训练误差应该不会增加,与没增加之前相比较。性能退化问题暗示多个非线性网络层用于近似identity mappings 可能有困难。使用残差学习改写问题之后,如果identity mappings 是最优的,那么优化问题变得很简单,直接将多层非线性网络参数趋0。
实际中,identity mappings 不太可能是最优的,但是上述改写问题可能对问题提供有效的预先处理 (provide reasonable preconditioning)。如果最优函数接近identity mappings,那么优化将会变得容易些。 实验证明该思路是对的。
3.2. Identity Mapping by Shortcuts
A building block
公式定义如下:

这里假定输入输出维数一致,如果不一样,可以通过 linear projection 转成一样的。
3.3. Network Architectures
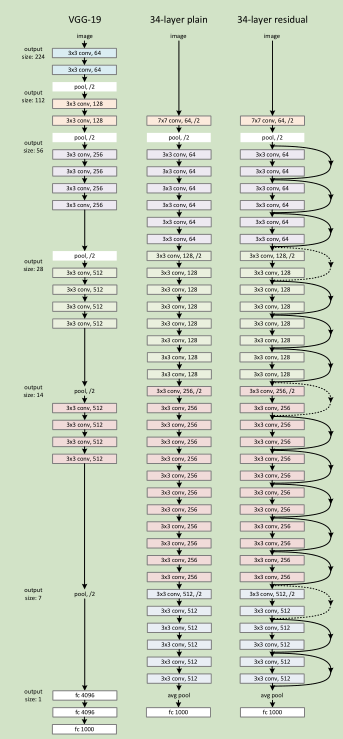
Plain Network 主要是受 VGG 网络启发,主要采用3*3滤波器,遵循两个设计原则:1)对于相同输出特征图尺寸,卷积层有相同个数的滤波器,2)如果特征图尺寸缩小一半,滤波器个数加倍以保持每个层的计算复杂度。通过步长为2的卷积来进行降采样。一共34个权重层。
需要指出,我们这个网络与VGG相比,滤波器要少,复杂度要小。
Residual Network 主要是在 上述的 plain network上加入 shortcut connections
3.4. Implementation
针对 ImageNet网络的实现,我们遵循【21,41】的实践,图像以较小的边缩放至[256,480],这样便于 scale augmentation,然后从中随机裁出 224*224,采用【21,16】文献的方法。
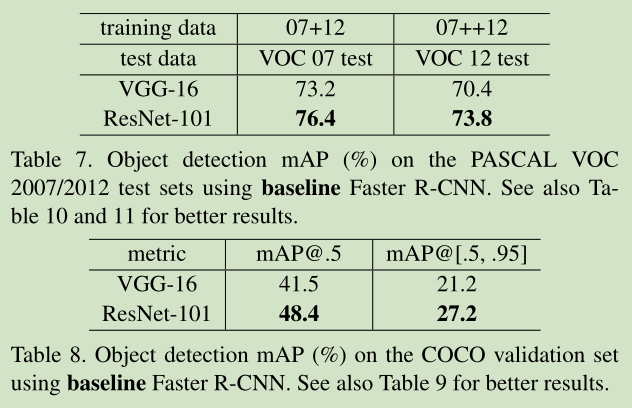
4 Experiments
目录
————————————
1. Motivation
2. 网络结构
3. 实验结果
4. 重要reference
1. Motivation
作者首先抛出了这个问题, 深度神经网络是不是越深越好。
照我们一般的经验,只要网络不训飞(也就是最早在LSTM中提出的vanishing/exploding problem),而且不过拟合, 那应该是越深越好。
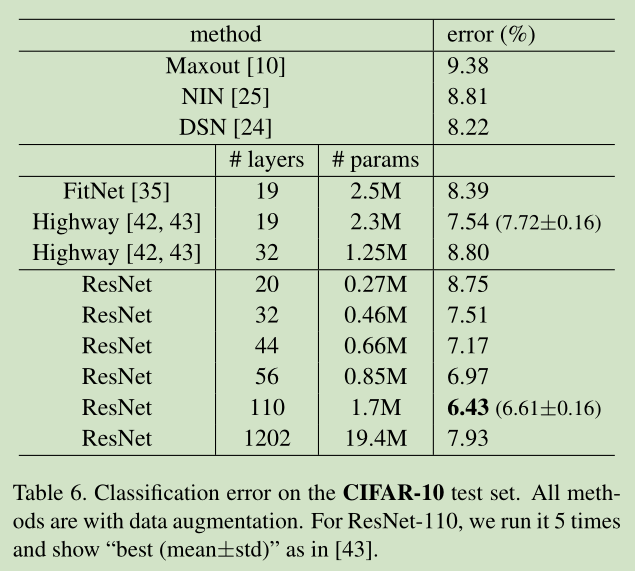
但是有这么个情况,网络加深了, accuracy却下降了,称这种情况为degradation。如下图所示(详见[1]):
Cifar-10 上的training/testing error. 网络从20层加到56层,error却上升了。
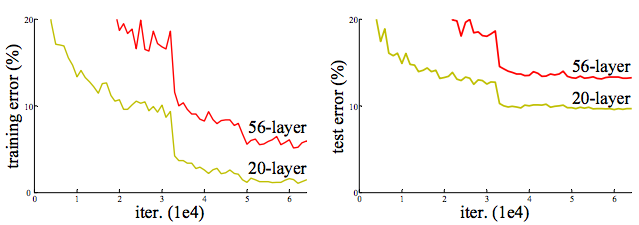
按理说我们有一个shallow net,在不过拟合的情况下再往深加几层怎么说也不会比shallow的结果差,所以degradation说明不是所有网络都那么容易优化,这篇文章的motivation就是通过“deep residual network“解决degradation问题。
2. 网络结构
Shortcut Connections
其实本文想法和Highway networks(Jurgen Schmidhuber的文章)非常相似, 就连要解决的问题(degradation)都一样。Highway networks一文借用LSTM中gate的概念,除了正常的非线性映射H(x, Wh)外,还设置了一条从x直接到y的通路,以T(x, Wt)作为gate来把握两者之间的权重,如下公式所示:
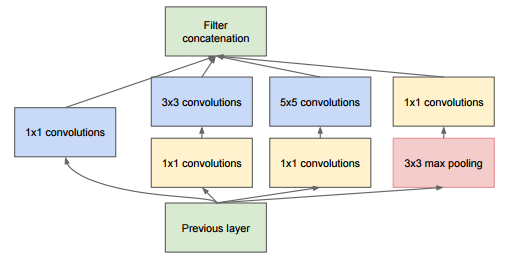
shortcut原意指捷径,在这里就表示越层连接,就比如上面Highway networks里从x直接到y的连接。其实早在googleNet的inception层中就有这种表示:
Residual Networks一文中,作者将Highway network中的含参加权连接变为固定加权连接,即
Residual Learning
至此,我们一直没有提及residual networks中residual的含义。那这个“残差“指什么呢?我们想:
如果能用几层网络去逼近一个复杂的非线性映射H(x),那么同样可以用这几层网络去逼近它的residual function:,但我们“猜想“优化residual mapping要比直接优化H(x)简单。
推荐读者们还是看一下本文最后列出的这篇reference paper,本文中作者说与Highway network相比的优势在于:
| x | Highway Network | Residual Network | 评论 |
|---|---|---|---|
| gate参数 | 有参数变量 | 没参数,定死的, 方便和没有residual的网络比较 | 算不上优势,参数少又data-independent,结果肯定不会是最优的,文章实验部分也对比了效果,确实是带参数的error更小,但是这个变量与解决degradation问题无关 |
| 关门? | 有可能关门() | 不会关门 | , 但一般不会为0 |
所以说这个比较还是比较牵强。。anyway,人家讲个故事也是不容易了。
34层 residual network
网络构建思路:基本保持各层complexity不变,也就是哪层down-sampling了,就把filter数*2, 网络太大,此处不贴了,大家看paper去吧, paper中画了一个34层全卷积网络, 没有了后面的几层fc,难怪说152层的网络比16-19层VGG的计算量还低。
这里再讲下文章中讲实现部分的 tricks:
- 图片resize:短边长random.randint(256,480)
- 裁剪:224*224随机采样,含水平翻转
- 减均值
- 标准颜色扩充[2]
- conv和activation间加batch normalization[3]
帮助解决vanishing/exploding问题 - minibatch-size:256
- learning-rate: 初始0.1, error平了lr就除以10
- weight decay:0.0001
- momentum:0.9
- 没用dropout[3]
其实看下来都是挺常规的方法。
3. 实验结果
-
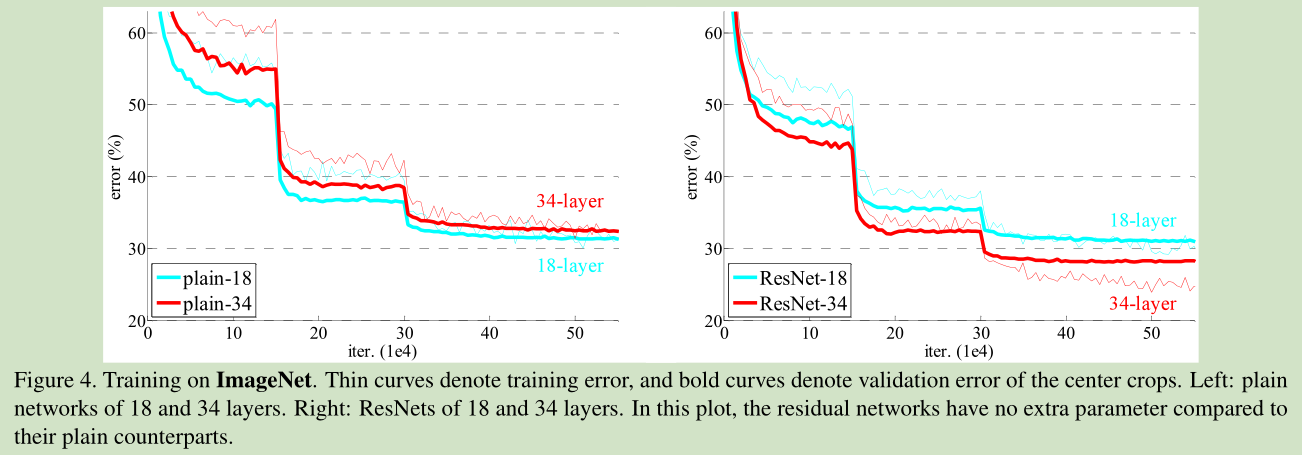
34层与18层网络比较:训练过程中,
34层plain net(不带residual function)比18层plain net的error大
34层residual net(不带residual function)比18层residual net的error小,更比34层plain net小了3.5%(top1)
18层residual net比18层plain net收敛快 -
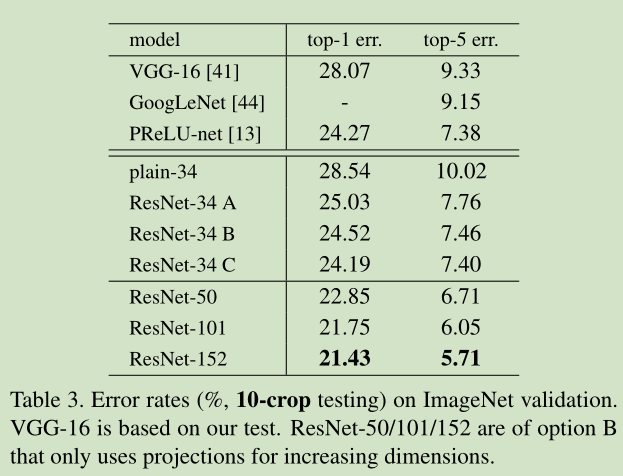
Residual function的设置:
A)在H(x)与x维度不同时, 用0充填补足
B) 在H(x)与x维度不同时, 带
C)任何shortcut都带
loss效果: A>B>C
4. 重要reference
[1]. Highway Networks
[2]. ImageNet Classification with Deep Convolutional Neural Networks
[3]. Batch Normalization
[4]. VGG