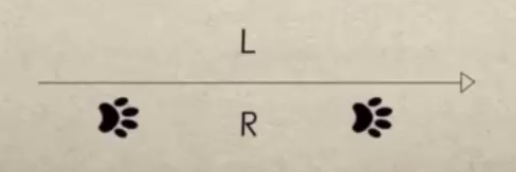
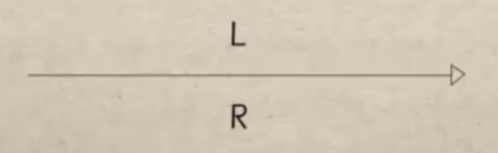
1.Walk行走
#稳定:三个脚掌支撑地面,构成了一个三角形。
2.Amble缓行
为walk步态的加速

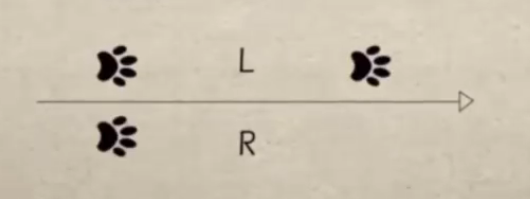
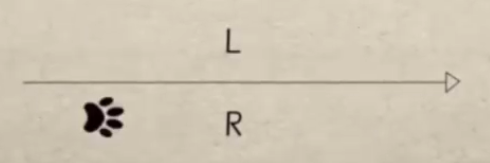
3.Pace踱步
#稳定性较差:同侧脚来回切换
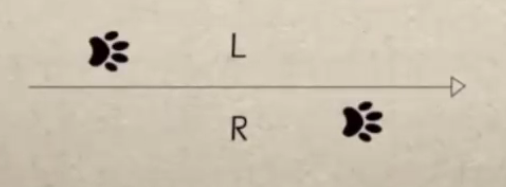
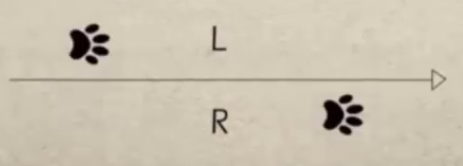
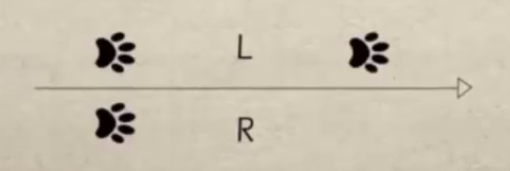
4.Trot小跑
#稳定性和速度兼具:腿成对角线的方式切换
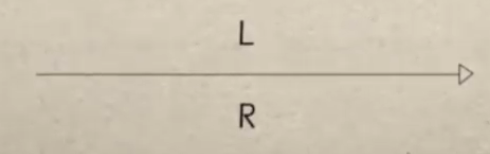
5.Canter慢跑
会有一段腾空的时间
6.Gallup/Run奔跑
注:图片来自动物步态可视化-孔令远
(此外,如有错误,欢迎指出,非常感谢!)
四足机器人不同步态的特点(笔记5/作业5)
猜你喜欢
转载自blog.csdn.net/weixin_47534339/article/details/106424278
今日推荐
周排行