四足机器人发展史及机器人盘点
- 本文翻译整理自文章
20世纪初前后
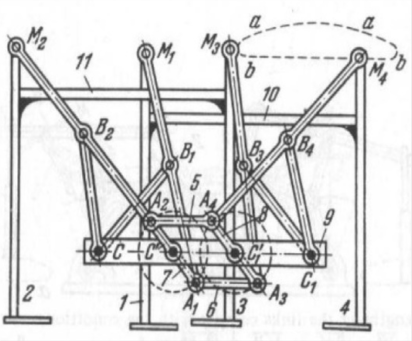
- 1870 CHebyshev(沙俄)发明了第一个行走机构, 将旋转运动转换为匀速平动运动.
- 由于连接机构形似希腊字母λ, 该连杆命名为λ机构.
- 可在平面运动, 没有独立的腿部运动
-
-
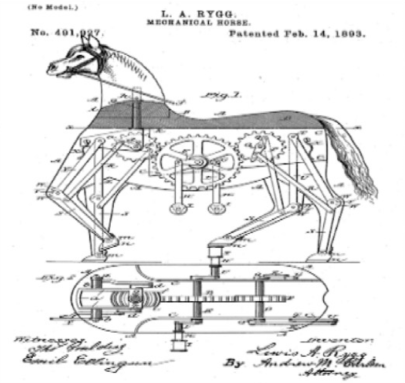
- Rygg(美国)发明了机器马, 在美国专利局申请了专利
- 骑手通过踏板提供动力, 经连杆和曲柄传递到机器上.
-
- Rygg(美国)发明了机器马, 在美国专利局申请了专利
20世纪中后期
-
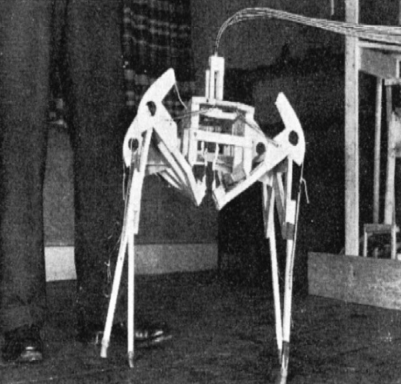
- Hutchinson(Britain), 最早能独立控制腿部的机器
- 四足, 高60cm
- 操作员通过柔性电缆控制八个关节
-
- Hutchinson(Britain), 最早能独立控制腿部的机器
-
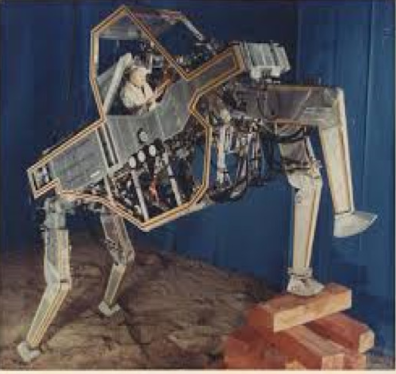
- 通用电气, Mosher(美国), 行走卡车
- 90H.P气体发动机
-
- 通用电气, Mosher(美国), 行走卡车
-
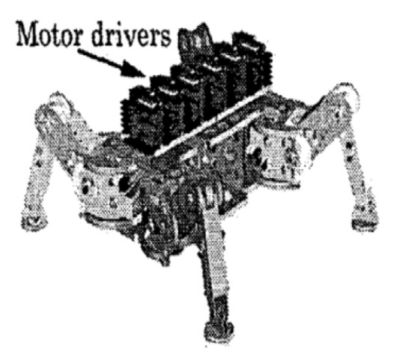
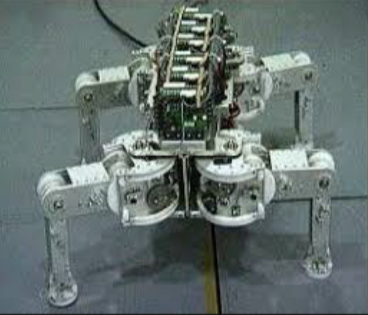
- 南加州大学, 倒T型腿四足
- 每条腿带两个独立旋转电驱关节
- 可使用小跑, 爬行, 对角等步态
- 每只脚为倒T型, 可保持平稳直立
-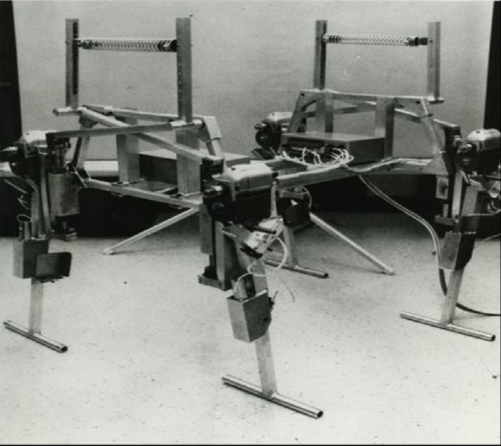
- 南加州大学, 倒T型腿四足
-
- Bucyrus-Brie Co.: 北美大狗鱼
- 重13500吨, 高约50m, 臂长约94m
- 四足液压驱动, 0.16公里每小时, 1990年被拆
-
- Bucyrus-Brie Co.: 北美大狗鱼
-
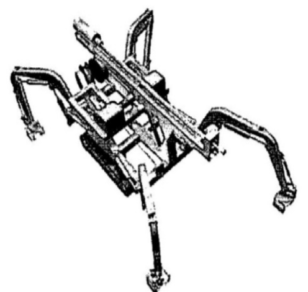
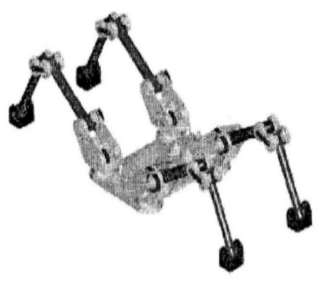
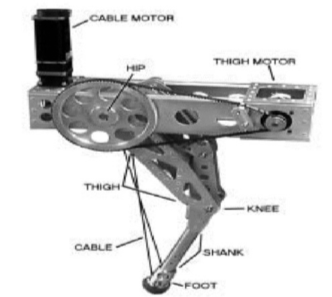
- Hirose & Kato: 长腿蜘蛛
- 重14kg, 腿长1.5m
- 每条腿一个电机+一个离合器(产生行走动力)
-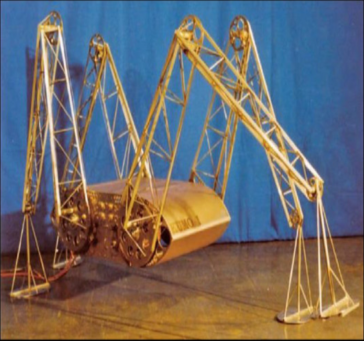
- Hirose & Kato: 长腿蜘蛛
-
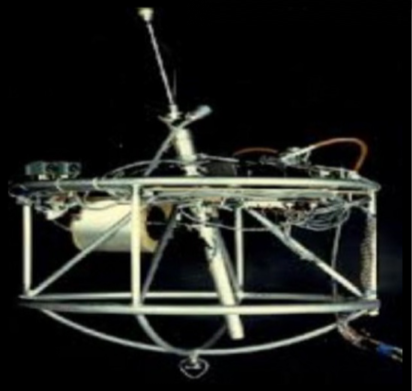
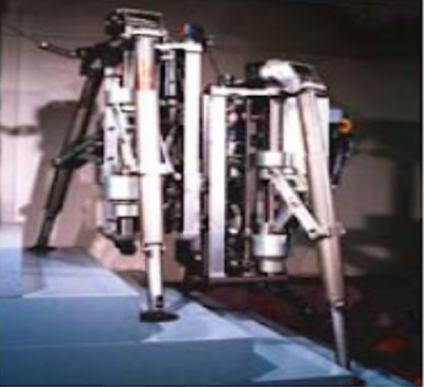
- Horse: Pre-Ambulate Vehicle
- 首个基于传感器运动控制实现爬楼梯
-
- Horse: Pre-Ambulate Vehicle
-
- Raibert(MIT): 规划器, 三维机器, 可像单腿人一样跑跳
- 单腿平衡和动力学专利原理超越了所有腿系统, 走在了生物足式机器人的前列
-
- Raibert(MIT): 规划器, 三维机器, 可像单腿人一样跑跳
-
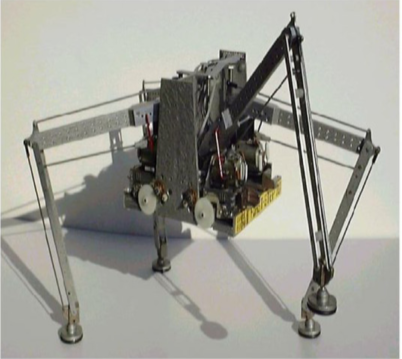
- Hirose: TITAN-III, 首个安装了智能程序, 足部触觉, 姿态传感器的攀爬机器人
-
- Hirose: TITAN-III, 首个安装了智能程序, 足部触觉, 姿态传感器的攀爬机器人
TITAN系列
-
- Hirose: TITAN-IV: 可逐步加速, 爬行转小跑
-
- 之后
- TITAN-V和TITAN-VI在重量,结构,动力上做了提升
- TITAN-VII: 协助在陡坡上的施工工作, 如移动脚手架
- TITAN-VIII: 新型绳驱动, 考虑重力解耦驱动GDA
- TITAN-IX: 人道主义排雷任务
- Hirose: TITAN-IV: 可逐步加速, 爬行转小跑
-
- TITAN-XI: 增添了在陡坡上钻孔的功能
- 重约700kg
- 液压驱动, 带控制器, Linux
- TITAN-XII: 可跨越大障碍物
- 速度1.5m/s
- 带电脑, mcu
- TITAN-XIII: 伸展式四足
- 速度1.38m/s
- 电池驱动

-
- Miura: Collie-I: 12自由度, 小尺寸
- L15cm, H28cm

- Kimura: Collie-II
- 6自由度
- 重约7.5kg
- 跨步周期超0.9s时不稳定
-
- Buchler & Robert (McGill U): SCOUT-I:
- 每条腿1自由度
- RC伺服马达控制臀部
- SCOUT-II: 爬楼梯
- 重约1.2kg
-
- Royal IT(Sweden): WRAP1
- 重约60kg
- 12自由度
- CAN总线通信

21世纪初的四足
-
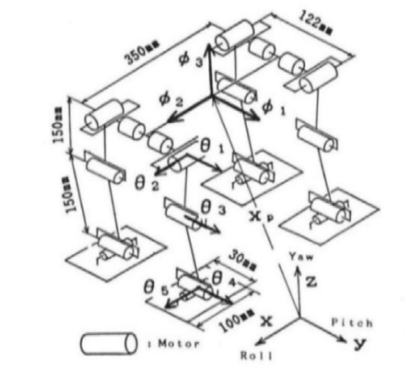
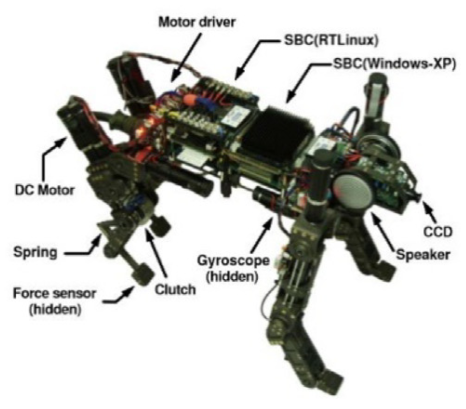
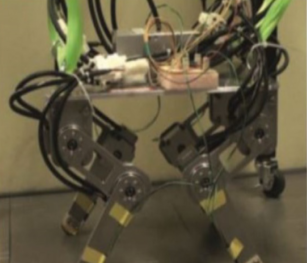
- Kimura: Patrush, RT-Linux+C
- 重约5.2kg
- 速度0.6m.s

- TEKKEN系列: 单一结构实现行走, 慢跑, 快跑步态, 基于神经系统和中心模式发生器CPG的不可变控制方法
-
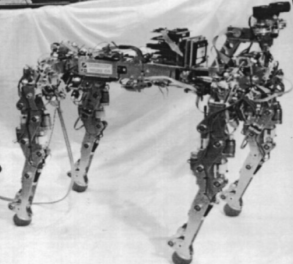
- KIT(德): BISAM仿生四足行走机器
- 每条腿四部分, 由基于滚珠丝杠驱动器的旋转关节组成, 12V伺服电机驱动
- 自适应传感器的反射耦合神经振荡
-
(日本): TITAN-VIII带驱动, 色彩跟踪, RT-Linux
-
IAI(CSIC(Spain): SILO4: 研究运动规划, 地形适应和稳定性
- 12自由度
- 电驱模仿昆虫腿
- 出书
-
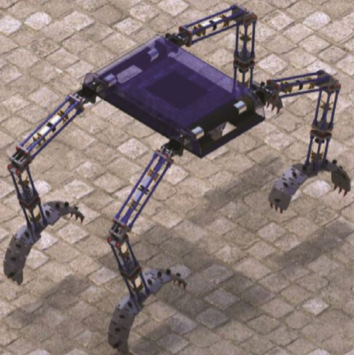
OSU&STANDFORD: OSQ, 从腿部开始优化, 仿真
- 单腿最快4.15m/s
- KOLT: OSQ落地版
- 单腿3自由度, 电磁驱动
-
Sungkyunkwan U(韩): MRWALLSPECT-III
- 地形适应, 平面行走, 爬墙, 拐弯
- RT-Linux + MCU
- AiDAN-I, AiDAN-III
- 单腿3自由度1被动关节
- 1中控16边控, 组成CAN网络, RT-Linux总控

-
KIIT韩国产业技术研究院: 双足双轮
- 12自由度
- 前驱, 汽油发动机, 液压控制

-
Sao Paulo U(巴西): 爬树机器人Kamambare
- 16自由度
- 重约1.3kg
- RT-Linux
-
Maufroy,Koteshu(日): 类似TAKEN1
- CPG实现节奏运动, 通过每条腿的加载/不加载来控制相位调制加载

-
- Wait: 气动伺服驱动
-
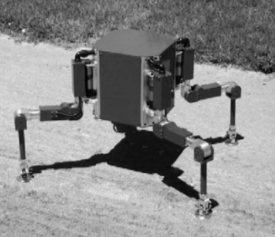
丰田技术研究所: 电驱四足Robocat-1
- 单腿2自由度
- 重约6.85kg
- 用快速移动算法小步跑
-
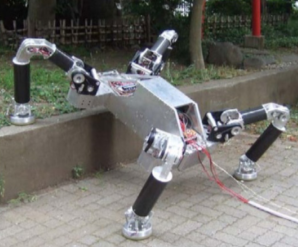
Kung,KAIST(韩): HuboDog
- 单腿3自由度
- 重约42kg
- L0.8m, H0.86m
- 无刷直流谐波传动减速齿轮

-
HIT哈工大: MBBOT, 全液压泵驱动
- 单腿4主动关节1被动弹簧, 腿装IMU
- 重约100kg
- 速度0.83m/s
-
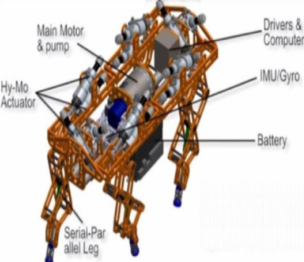
- SJTU上交: 象型机器人
- 4串并联混合动力机构腿, 新开发的液压驱动其HyMo驱动
-
BIT北理工: 液压四足
- 16自由度, 汽油引擎驱动
- 重约120kg
- 最大速度0.8m/s

-
- SDU山大: SCalf-1
- 12自由度
- 内燃机驱动, 1先行液压伺服缸全驱动
- 小跑模式1.2m/s

-
- SDU: SCalf-2
- +液压, 伺服, IMU, 力感


现代四足
-
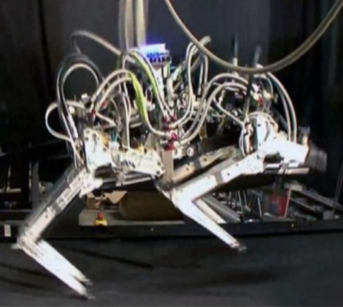
- IIT(意): HyQ, 可跑可跳
- 8液压驱动, 4电驱
- 导航, 3d视觉, 地形适应, IMU, PC104-RT-Linux
- HyQ2max: +健壮, 角度, 扭矩
- HyQ2cetaur: 一对六自由度驱动器液压壁
-
- Hutter(ETH): Star1ETH
- 高标准弹性执行机构, 类似肌肉, 可存大量能量
- IMU, 为关节提供运动信息
-
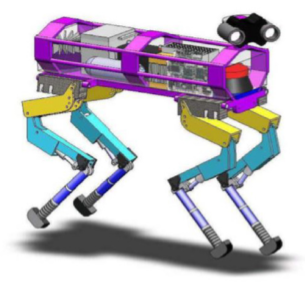
ETH: ANYmal
- 高精电机, 跑步姿态
- 重约30kg带电池, 光学/热敏相机, 收集, 动态照明, 气测
- 特殊商业, 工业环境作业, 搜救

-
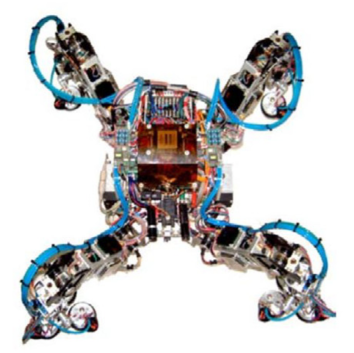
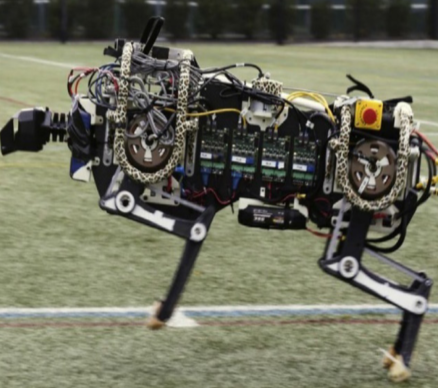
- MIT: Cheetah
- 4个设计原则, 减少运动的能量损失机制
- 功率973W
-
- MIT Cheetah-2
- 速度0-4.5m/s
- 跑步机, 草地, 不平坦地形上跑
- 2.5m/s跨栏(40cm)
波士顿动力
-
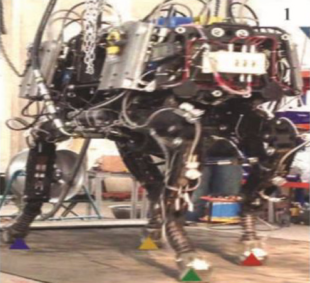
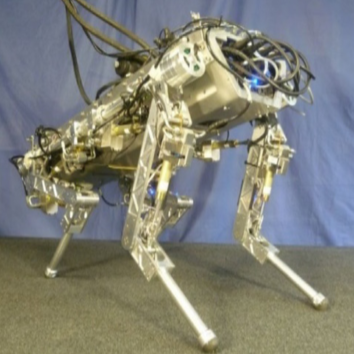
- Boston Dynamic: Big Dog2nd
- 单腿4自由度
- 50运动传感器: 关节位置, 地面接触, 关节力, 陀螺仪, 地面载荷, 光探测, 测距, 3D相机
- 15马力汽油发动机
- 0.8m/s, 爬35°坡, 冰面, 沼泽, 森林, 被踢自恢复
- QNX, RT-Linux
- 美国防部资助, 因噪声太大被终止

-
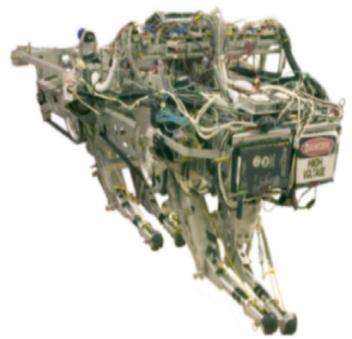
- LS3(Alpha Dog)
- 12关节, 所有液压执行器由燃气&柴油发动机驱动
- 3D视觉, 雷达检测+生成路径

-
- Little Dog
- 高增益伺服电机驱动关节
- 单腿3自由度
- 身体和腿有22个反射球, 以检测位置, 关节角度

-
- Cheetah
- 实验室跑步机12.5m/s
-
- Wildcat
- 154kg
- 一台甲醇燃烧发动机驱动所有液压执行器
- 世界最快, 室外9m/s
- 小跑, 快跑, bound步态
-
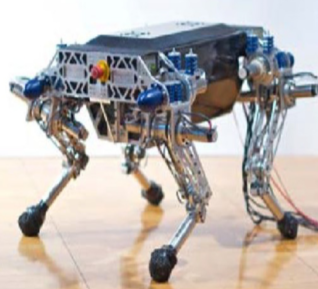
- Spot
- 重约30kg, L1.1m, H0.84m
- 1.6m/s
- 电池驱动
- 全向行走, 小跑步态
- 3D相机SLAM, 避障, 爬楼梯, 环境适应, 室内外工作机械臂

待补充
- ETH轮足, 宾大, IIT拉飞机狗, MIT, 斯坦福开源小四足, 南科大四足,双足
- 企业: 宇树, 云深处, 腾讯, 美团, 小米, 小鹏
- 仿生: Festo