
简介
本文主要根据“轮腿机器人Hyun”总结的硬件部分。
轮腿机器人Hyun开源地址:https://github.com/HuGuoXuang/Hyun

1 电源部分
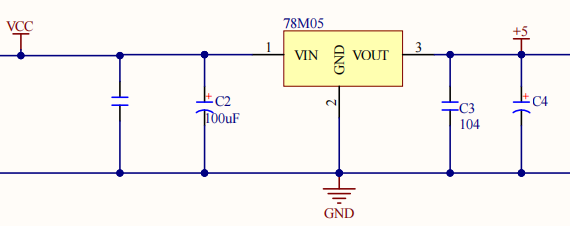
1.1 78M05
78M05是一款三端稳压器芯片,它可以将输入电压稳定输出为5V直流电压.
1.2 AMS1117-3.3
AMS1117-3.3是一种输出电压为3.3V的正向低压降稳压器,适用于高效率线性稳压器。

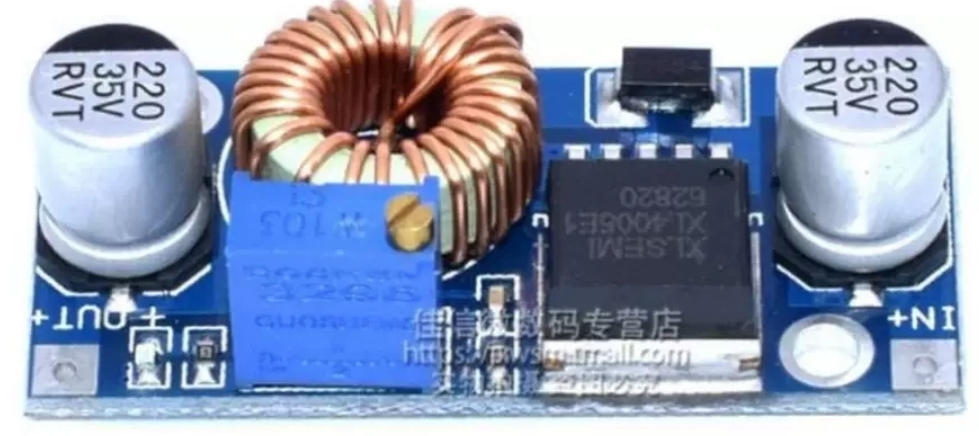
1.3 DC-DC
DC-DC是一种在直流电路中将一个电压值的电能变为另一个电压值的电能的装置。

2 MPU6050陀螺仪
MPU6050是由三个陀螺仪和三个加速度传感器组成的6轴运动处理组件,它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器 DMP( DigitalMotion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其 I2C或SPI接口输出一个9轴的信号( SPI接口仅在MPU-6000可用)

通过MPU6050读取加速度和角度的原始数据,数据管理平台(DMP)将原始角速度转化为四元数,进而完成欧拉角的计算。
2.1 四元数
四元数,是简单的超复数。 复数是由实数加上虚数单位 i 组成,其中i²= -1。 相似地,四元数都是由实数加上三个虚数单位 i、j和k 组成,而且它们有如下的关系: i² = j² = k² = -1, iº = jº = kº = 1 , 每个四元数都是 1、i、j 和 k 的线性组合,即是四元数一般可表示为a + bi+ cj + dk,其中a、b、c 、d是实数。
对于i、j和k本身的几何意义可以理解为一种旋转,其中i旋转代表Z轴与Y轴相交平面中Z轴正向向Y轴正向的旋转,j旋转代表X轴与Z轴相交平面中X轴正向向Z轴正向的旋转,k旋转代表Y轴与X轴相交平面中Y轴正向向X轴正向的旋转,-i、-j、-k分别代表i、j、k旋转的反向旋转。
3 轮腿部分
3.1 AS5147P
超高速磁性旋转位置传感器。
AS5147P在转速最高达28,000rpm的情况下仍能提供精确的绝对和增量测量输出。
AS5147P利用DAEC(动态角度误差补偿)专利技术,即使在极高的转速下也能进行精确的位置测量。DAEC补偿技术将传感器信号链的传输延迟降到几乎为零。
AS5147P采用TSSOP-14封装。

| 管脚号 |
管脚名 |
管脚类型 |
描述 |
| 1 |
Csn |
数字输入 |
SPI芯片选择(低激活) |
| 2 |
CLK |
数字输入 |
SPI 时钟 |
| 3 |
MISO |
数字输出 |
主设备数据输入,从设备数据输出 |
| 4 |
MOSI |
数字输入 |
主设备数据输出,从设备数据输入 |
| 5 |
TEST |
测试(连地) |
|
| 6 |
B |
数字输出 |
增量信号B |
| 7 |
A |
数字输出 |
增量信号A |
| 8 |
W/PWM |
数字输出 |
通信信号W或者PWM编码输出 |
| 9 |
V |
数字输出 |
通信信号V |
| 10 |
U |
数字输出 |
通信信号U |
| 11 |
VDD |
电源供应 |
5V |
| 12 |
VDD3V3 |
电源供应 |
3.3V |
| 13 |
GND |
接地 |
|
| 14 |
I/PWM |
数字输出 |
增量信号I(index)或者PWM |
3.1.1 SPI通信
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
(1)SDO – 主设备数据输出,从设备数据输入
(2)SDI – 主设备数据输入,从设备数据输出
(3)SCLK – 时钟信号,由主设备产生
(4)CS – 从设备使能信号,由主设备控制
3.2 电机
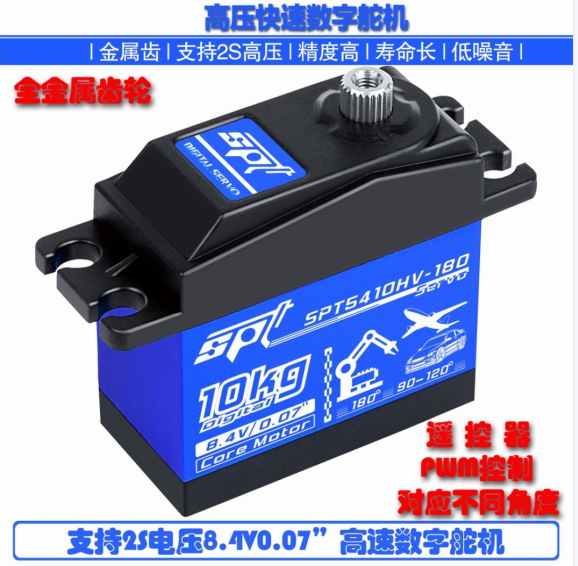
电机和舵机都是电动机的一种,区别在于舵机通常用于控制机械系统的位置,而电机通常用于转动。

3.3 连接电机:TB002-500-03BE
固定接线端子。

4 舵机
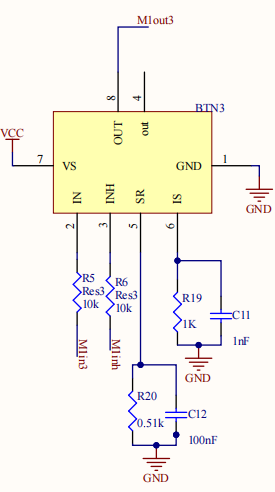
4.1 BTN8982TA
BTN8982TA 是一款高电流半桥集成,适用于电机驱动应用。该器件属于 NovalithIC™ 系列,封装内包括一个 P 通道高边 MOSFET 和一个N 通道低边 MOSFET 及一个集成驱动 IC。由于使用了 P 通道高边开关, 无需电荷泵也可最大限度地降低 EMI。集成驱动器 IC 可轻松连接至微控制器,该集成驱动器具有逻辑电平输入, 电流感测, 转换速率调整, 死区时间生成以及过温、欠压、过流和短路保护的特性。
4.2 舵机
5. FUTABA遥控器
价格较贵,几千元以上。

参考
轮腿机器人Hyun开源地址:https://github.com/HuGuoXuang/Hyun