之前的gazebo教程某种程度上讲是为了四足机器人做准备的,这节我们就讲解如何在gazebo搭建一个属于自己的四足机器人
文章目录
先来看高清大图,这是我参照mini-cheetah画出来的简图,结构尺寸基本按照其原本大小设计,本次搭建就基于此模型。

1、打开gazebo
命令行输入
gazebo
然后依次点击edit ->Model Editor打开模型编辑器

2、导入网格文件
我们准备了四个stl文件,分别是主体,上下腿部关节

1、主体与腿部连接件
点击左边栏add按钮,

填入文件meshes/body.STL路径后点import,在场景中点击任意位置放置零件。

扫描二维码关注公众号,回复:
10145645 查看本文章

接下来调整至正确位置,双击零件打开Link inslector,

在visual和collision栏inertial项中修改Pose。

正确修改完后body的位姿会如下所示。

接下来我们导入腿部连接件abdb.STL,重复上述导入步骤。同样我们需要调整好连接件位置(绕x轴旋转90度),如下图:

接下来我们添加关节,点击橙色框内图标创建关节

添加以下关系
- 该零件x轴偏移为0.125,
- y轴偏移为-0.049,
- 旋转轴设为x轴

最后点击create确定

重复以上步骤添加所有腿部连接件,最终我们得到模型如下:

2、上腿部
调整好上腿部零件位姿(我们初始位姿为竖直向下,因此需要绕y轴旋转-90度)。与腿部连接件的偏移分别为
- x:65mm
- y:-55mm
- z:0mm
- 旋转轴设置为-y轴

gazebo中的效果如下:

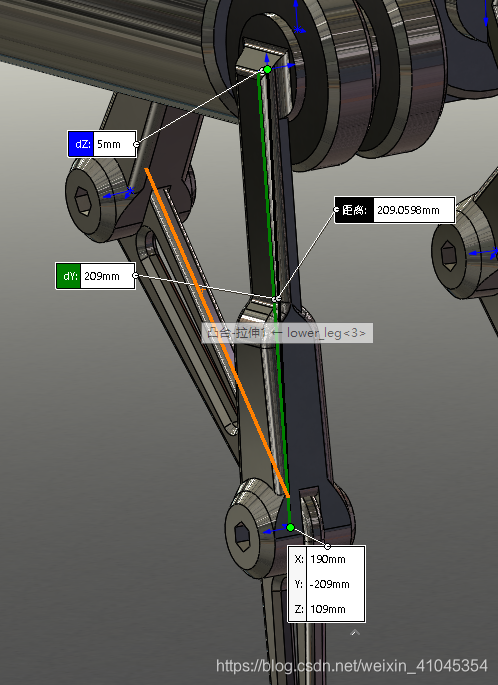
下腿
位置关系如图所示,
- x:0mm
- y:-5mm
- z:-209mm
- 旋转轴设置为-y轴