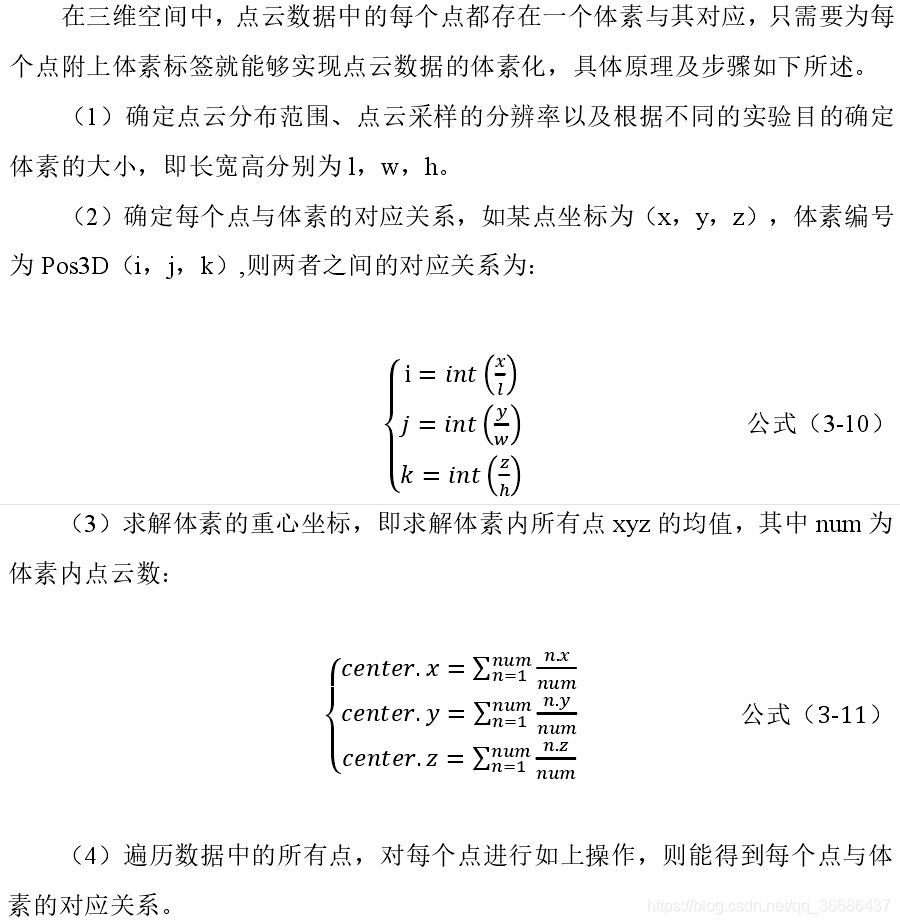
算法原理
代码实现
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <iostream>
#include <pcl/octree/octree.h>
using namespace std;
typedef std::vector< pcl::PointXYZ, Eigen::aligned_allocator<pcl::PointXYZ> > AlignedPointTVector;
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile<pcl::PointXYZ>("30m1_C.pcd", *cloud);
cout << "loading " << cloud->points.size() << " datas from file." << endl;
AlignedPointTVector voxel_center;
voxel_center.clear();
float resolution = 0.25f;
pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(resolution);
octree.setInputCloud(cloud);
octree.addPointsFromInputCloud();
octree.getOccupiedVoxelCenters(voxel_center);
cout << "the number of voxel are : " << voxel_center.size() << endl;
return 0;
}