PCL体素化降采样 实现立方体体素可视化
- PCL库函数自带的VoxelGrid类能够实现对点云进行降采样。基本原理是对点云进行网格划分,落在每个小立方块区域中的点的重心就代表网格中的所有点。因此通过控制网格边长就能够控制降采样的点数。缺点在于不能指定降采样点数大小,只能通过调参逼近。
- 具体的体素化代码实现不做介绍,可以参考以下博客:
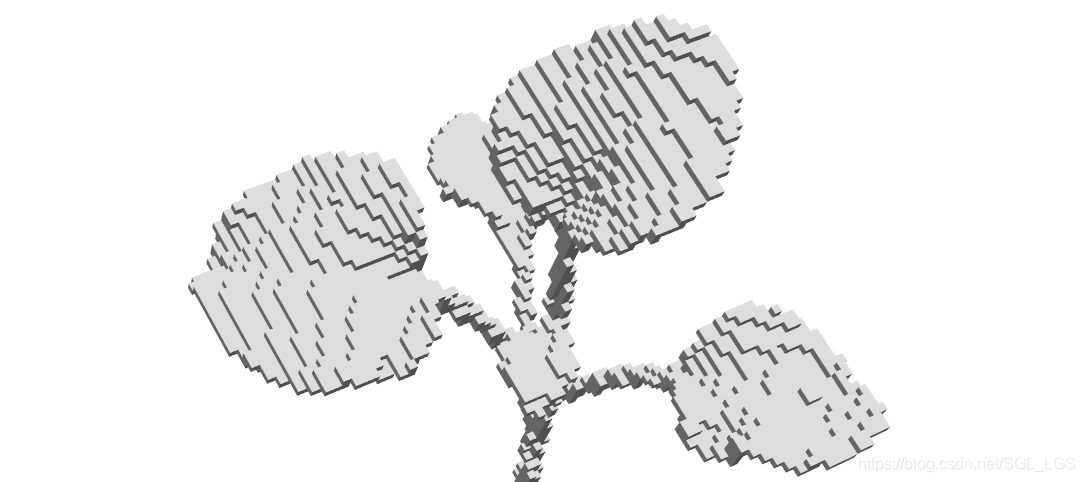
体素栅格滤波(下采样) - 以下代码功能是可视化立方体体素
- 目前没有实现改变体素颜色,后期视使用情况增添(版本二)
#include <thread>
#include <pcl/common/common_headers.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std::chrono_literals;
using namespace std;
int main(int argc, char** argv) {
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("HelloMyFirstVisualPCL"));
viewer->setBackgroundColor(1, 1, 1);
FILE*fp = NULL; fp = fopen("filename.txt", "r"); //2DpointDatas.txt
if (!fp)
{
printf("打开文件失败!!\n");
int m;
cin >> m;
exit(0);
}
float x = 0, y = 0, z = 0;
int i = 0;
while (!feof(fp))
{
float voxel = 0.82;
i++;
fscanf(fp, "%f %f %f", &x, &y, &z);
Eigen::Vector3f center(floor(x / voxel)*voxel + voxel/2, floor(y / voxel)*voxel + voxel/2, floor(z / voxel)*voxel + voxel/2);
Eigen::Quaternionf rotation(1, 0, 0, 0);
string cube = "cube" + to_string(i);
viewer->addCube(center, rotation, voxel, voxel, voxel, cube);
}
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
std::this_thread::sleep_for(100ms);
}
return 0;
}
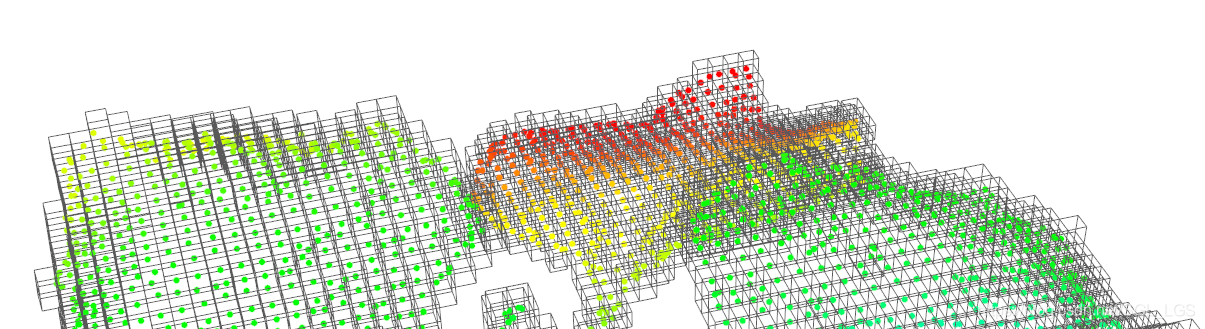
版本二
- 加入点线框和改变点和线框的颜色
- 可以将两个读入改为一个此处就不修改了
#include <thread>
#include <pcl/common/common_headers.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/io/pcd_io.h> //文件输入输出
using namespace std::chrono_literals;
using namespace std;
int main(int argc, char** argv) {
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("HelloMyFirstVisualPCL"));
viewer->setBackgroundColor(1, 1, 1);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("el.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
return -1;
}
cout << "there are " << cloud->points.size() << " points before filtering." << endl;
FILE*fp = NULL; fp = fopen("el.txt", "r"); //2DpointDatas.txt
if (!fp)
{
printf("打开文件失败!!\n");
int m;
cin >> m;
exit(0);
}
float x = 0, y = 0, z = 0;
int i = 0;
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> fildColor(cloud, "z"); // 按照z字段进行渲染
//viewer->addPointCloud(cloud);
viewer->addPointCloud<pcl::PointXYZ>(cloud, fildColor, "sample cloud");
while (!feof(fp))
{
float voxel = 1.85;
i++;
fscanf(fp, "%f %f %f", &x, &y, &z);
string cube = "cube" + to_string(i);
float x_min = floor(x / voxel)*voxel;
float x_max = floor(x / voxel)*voxel + voxel;
float y_min = floor(y / voxel)*voxel;
float y_max = floor(y / voxel)*voxel + voxel;
float z_min = floor(z / voxel)*voxel;
float z_max = floor(z / voxel)*voxel + voxel;
double r = 0.5, g=0.5, b =0.5;
viewer->addCube(x_min, x_max, y_min, y_max, z_min, z_max, r, g, b, cube);
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, cube);
}
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
std::this_thread::sleep_for(100ms);
}
return 0;
}
