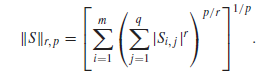
1.常用的矩阵范数
矩阵的
lr,p范数定义为:
F范数和
l2,1范数可以转化为:
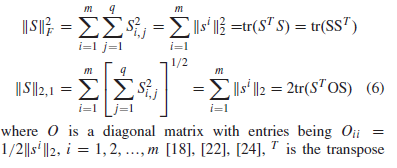
S的
l2,1范数其实就是每一行向量的
l2范数之和。在最小化问题中,只有每一行的
l2范数最小才能使总和最小,而每一个行范数最小就要求行内尽可能多的元素为0,即行稀疏。所以,通过约束矩阵的
l2,1范数会得到一个行稀疏的矩阵。
矩阵
S的
l2范数是所有元素的平方和再开方,
l2范数可以防止过拟合,提升模型的泛化能力。
l2范数最小,会使矩阵中的每一个元素都很小,接近于0。与
l1范数不同,
l2范数不会让元素等于0,而是接近0.
核范数为矩阵奇异值的和,用于约束低秩。因为
rank(W)是非凸的,故在优化中常使用其凸近似,也就是核范数。
2.标量函数对矩阵变量求导
定义:矩阵X,函数f(X)是以X为自变量的数量函数,定义f(X)对X的导数为
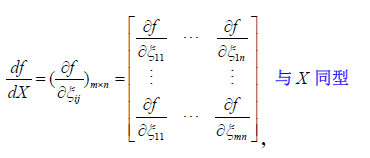
例如:
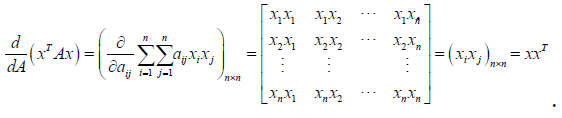
常用的矩阵导数有:
∂Q∂tr(QTAQ)=(A+AT)Q
∂Q∂tr(QAQT)=Q(A+AT)
∂A∂tr(AB)=∂A∂tr(BA)=BT
∂A∂tr(AAT)=2A ,
∂A∂tr(A2)=2AT
∂Q∂tr(QTA)=∂Q∂tr(ATQ)=∂Q∂tr(AQT)=A
tr(ABC)=tr(CAB)=tr(BCA)

