因为直接插入排序算法适用于基本有序的排序表和数据量不大的排序表。基于这两点,D.L. Shell 提出了希尔排序,又称缩小增量排序
其思想为:
先将待排序表分割成若干个子表,对每个子表进行一次直接插入排序,统称为一趟希尔排序,子表的分割是以增量为基础的,而最终增量会减少到 1 ,( 至于如何减少,或者说以一个怎样的函数规律来减少增量值,现在并无准确结果,希尔提出的方法是 d = d / 2 ),这时即为整体的一趟直接插入排序,希尔排序结束。
子表划分:
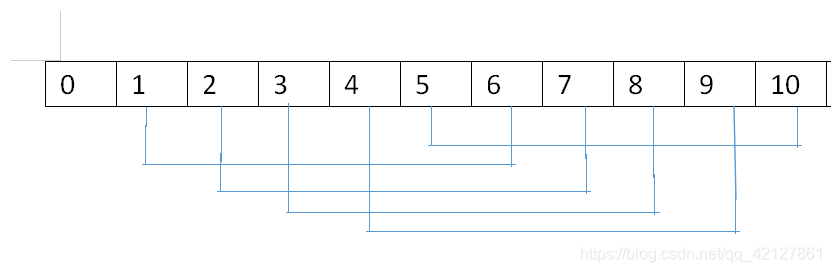
上表为一次子表划分,划出了 5 个子表,即一次希尔排序,增量 Dk 为 5,其中的 A [ 0 ] 是用来暂存子表直接插入排序时的待插入元素的,如果要对子表进行第二次希尔排序的话,增量要减小,并且重新划分子表,每个子表进行直接插入排序
算法存储结构适用性:存储结构的话,只能使用顺序存储结构,因为希尔排序会涉及到随机访问数组元素
希尔排序时间复杂度问题:由于希尔排序的时间复杂度依赖于增量序列函数,这涉及数学上尚未解决的难题,所以其时间复杂度分析比较困难。当 n 在某个特定的范围是,希尔排序的时间复杂度约为 O(n^1.3) 。在最坏的情况下希尔排序时间复杂度为 O(n^2) 。
希尔排序是否稳定问题:希尔排序是不稳定的排序,因为希尔排序将待排序表分成了子表,所以相当于在每一趟排序的时候,子表之间是透明的,故这就可能引起,不稳定的情况,但是子表内的直接插入排序是稳定的
算法实现
/*
希尔排序:
时间复杂度->无准确渐进时间,时间复杂度依赖于增量序列的函数
空间复杂度->O(1)
是否稳定:否
*/
#include<bits/stdc++.h>
using namespace std;
#define MAX_SIZE 11
typedef struct
{
int key;
} ElemType;
void ShellSort(ElemType A[],int n) //升序排列
{
int i,j,dk;
for(dk=n/2;dk>=1;dk=dk/2){
for(i=dk+1;i<=n;i++){//多路排序同时进行,但为一趟希尔排序,即相同增量的属于同一趟排序
if(A[i].key<A[i-dk].key){
A[0]=A[i];//暂存元素
for(j=i-dk;j>0&&A[0].key<A[j].key;j-=dk){//此处的小于号,决定了,子表的直接插入排序是稳定的
A[j+dk]=A[j];
}
A[j+dk]=A[0];
}
}
}
}
int main()
{
ElemType A[MAX_SIZE]= {{-1},{10},{9},{8},{7},{6},{5},{4},{3},{2},{1}};
ShellSort(A,MAX_SIZE-1);
for(int j=1; j<=MAX_SIZE-1; j++)
{
cout<<A[j].key<<" ";
}
return 0;
}
