1.原理介绍
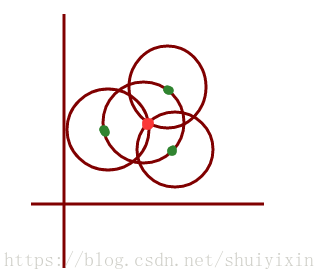
opencv中实现霍夫圆变换原理其实很简单的,初中生都会的,所以大家不要担心了啦,看下面这张图片,你看到了啥?
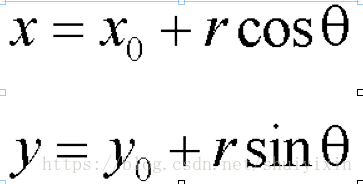
对,没错,就是两根直线,四个圆,四个点,四个点分别是四个圆的圆心。并且四个圆大小是一样的(看着一样哈,大家就当一样吧,别用尺规作图去验证了)大家根据自己的理解去找对应关系啊!虽然本人学数学,但是美术不行啊!!!三个绿点点,对对对就是那三个,都是中间圆的圆上的一点,这样外面三个圆都会交于一点(理论上),通过RGB加和,中间的红点点会特别亮,因为RGB比较高嘛,这个点就是中间圆的圆心。然后圆上会有无数的绿点点,这样就能找出圆心啦,半径也就能对应求出来了。至于理论,看看后面这个公式就好啦。
2.API介绍
你问我啥是API,打不死你,回去问度娘去。
算了算了,来来来,我们一起涨姿势————
API:(Application Programming Interface,应用程序编程接口)是一些预先定义的函数,目的是提供应用程序与开发人员基于某软件或硬件得以访问一组例程的能力,而又无需访问源码,或理解内部工作机制的细节。
很简单嘛!举个栗子,小明去上课,学校离家100多公里,自己跑着去,累不死他,自己造车?这么牛逼他上啥学啊,成立小明牌汽车直接就是大款了。
然后他邻居是开车的,关系好,免费送他去上学,完美!prefect!!!这个邻居就相当于这个API,你不用管邻居怎么送他去,你只要认识这个邻居,认识学校就好了。
所以,所谓API,你只要知道他能实现什么功能,参数是做什么的就行了。当然,如果你是想做API,想做算法,那就另说了。你要理解里面的实现机制,你得知道隔壁老王,怎么送你去学校,是自行车,汽车,还是轮滑……你也得知道他为什么用这个送你,是为了跟你套近乎?还是顺路?
废话有点多了哈。大家了解API了吧!下面就让我们一起走进HoughCircles吧。
霍夫圆变换的函数API如下:
void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1 = 100, double param2 = 100, int minRadius = 0, int maxRadius = 0 )
各个参数含义如下:
//第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的灰度单通道图像。 //第二个参数,InputArray类型的circles,经过调用HoughCircles函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了3个元素的浮点矢量(x, y, radius)表示。 //第三个参数,int类型的method,即使用的检测方法,目前OpenCV中就霍夫梯度法一种可以使用,它的标识符为CV_HOUGH_GRADIENT,在此参数处填这个标识符即可。 //第四个参数,double类型的dp,用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,且此参数允许创建一个比输入图像分辨率低的累加器。上述文字不好理解的话,来看例子吧。例如,如果dp= 1时,累加器和输入图像具有相同的分辨率。如果dp=2,累加器便有输入图像一半那么大的宽度和高度。 //第五个参数,double类型的minDist,为霍夫变换检测到的圆的圆心之间的最小距离,即让我们的算法能明显区分的两个不同圆之间的最小距离。这个参数如果太小的话,多个相邻的圆可能被错误地检测成了一个重合的圆。反之,这个参数设置太大的话,某些圆就不能被检测出来了。 //第六个参数,double类型的param1,有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示传递给canny边缘检测算子的高阈值,而低阈值为高阈值的一半。 //第七个参数,double类型的param2,也有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示在检测阶段圆心的累加器阈值。它越小的话,就可以检测到更多根本不存在的圆,而它越大的话,能通过检测的圆就更加接近完美的圆形了。 //第八个参数,int类型的minRadius,有默认值0,表示圆半径的最小值。 //第九个参数,int类型的maxRadius,也有默认值0,表示圆半径的最大值。 //需要注意的是,使用此函数可以很容易地检测出圆的圆心,但是它可能找不到合适的圆半径
通过对API的理解,我们接下来就要自己调试一下程序啦!!!
大家随便选一张啦,也可以自己做图片或者拍几张。
#define INPUT_TITLE "input image" // 宏定义,原始图片
#define OUTPUT_TITLE "HoughCircle picture" // 宏定义,经过霍夫圆变换后的图片
#include<iostream>
#include<opencv2\opencv.hpp>
#include<opencv2\core.hpp>
using namespace std;
using namespace cv;
int main() {
//img是最后经过霍夫圆变换的图片,src是通过imread读取的图片,change_src是src需要经过的变换的图片。
Mat img, src,change_src;
src = imread("D:/image/circle1.bmp");
if (!src.data)
{
cout << "ERROR : could not load image.";
return -1;
}
namedWindow(INPUT_TITLE, CV_WINDOW_AUTOSIZE);
namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);
imshow(INPUT_TITLE, src);
//中值滤波,去除椒盐噪声。并转为单通道。
medianBlur(src, change_src, 3);
cvtColor(change_src, change_src, CV_BGR2GRAY);
//霍夫圆变换
vector<Vec3f> pcircles;
HoughCircles(change_src, pcircles, CV_HOUGH_GRADIENT, 1, 10, 100, 30, 5, 50);
//
src.copyTo(img);
cout << "pcircles.size() = "<<pcircles.size() << endl;//为了了解HoughCircles中第二个参数的大小。
//将圆画在原图片上。
for (int i = 0; i < pcircles.size(); i++)
{
Vec3f cc = pcircles[i];
circle(img, Point(cc[0], cc[1]), cc[2], Scalar(0, 0, 255), 2, LINE_AA);
circle(img, Point(cc[0], cc[1]), 2, Scalar(255, 0, 4), 2, LINE_AA);
}
imshow(OUTPUT_TITLE, img);
waitKey(0);
return 0;
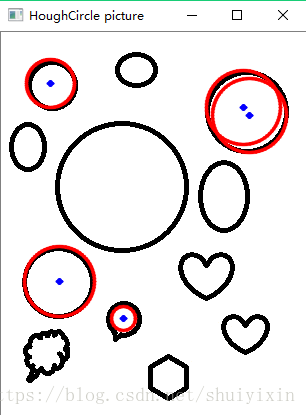
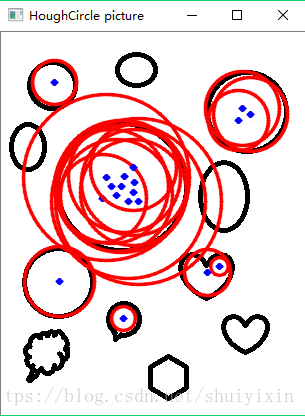
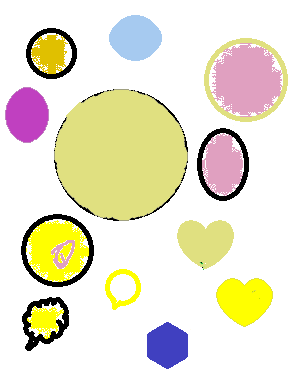
}效果图如下,三个通过按住shift生成的圆都被识别出来了,至于个头最大的那个,是因为设置的识别最大的圆半径限制在50以内:如果把50改成150,就变成后面那个了。
HoughCircles(change_src, pcircles, CV_HOUGH_GRADIENT, 1, 10, 100, 30, 5, 50);)