文章目录
summary从贝叶斯看及机器学习 – 总体思路


- 这里纠正一点,其实在MLE里面,f(x|θ)已经不是分布函数了,就是直接从给输出到输出的映射了
- 注意,这里的P(x~|D)你可以理解为新的数据的概率分布(纯inference)然后做概率到决策的映射(decision which is not discussed in this chapter ),也可以理解为输出的就是x~ 对应的tag(回归问题中是连续变量,分类问题中是离散变量)的分布【似乎更多的时候采用的思路是后者 】

- 这里我们可以看到,我们并没有说具体的f(x|θ) ( 有的地方也写作f(x;θ)或者f(x;w) ) 是什么(在整套思想中,f(x;θ)是什么并不影响整个流程 [ 所以后面我们可以看见讲贝叶斯预测/贝叶斯思想运用到线性回归问题等,实际上线性回归问题就是把f(x;θ)建模成一个线性函数而已 ] )
混淆点
- MAP和MLE其实都求了具体的θ出来,但是MAP有用先验信息,所以还是贝叶斯学派,但是仍然不是标准的贝叶斯估计,切记,贝叶斯估计要得到就是后验概率(which MAP为了简化计算绕过去了= =把精华绕过去了2333 )
- 而且无论是贝叶斯学派还是频率学派,其实都有要求分布是有参数形式的,i.e.P(x|θ)是可以用参数形式写出来的(比如高斯分布),区别就在于标准的贝叶斯估计(MAP不是标准的贝叶斯估计)不需要求具体的θ
- 似然函数是统计学共有的思想,只有最大似然才是频率学派的思想 (贝叶斯估计中也用到了似然函数以计算后验概率鸭)
MLE详解–Frequentist观点
refer @ https://zhuanlan.zhihu.com/p/81132832
- 对于似然函数的理解:

最大似然的特点(2个 including 缺点)
- 认为θ是一个常值 (贝叶斯学派认为θ是一个变量)
- 也是缺点,容易过拟合,理由如下:
真实世界的方差并不是无偏估计,且被低估了- 这三个小数据集,总体的mean是和真实的mean一致的,但是由于低估了真实样本的variance,所以引入了bias
- 由于variance太大导致了小数据集出现了bias


- 还有值得注意的一点就是:曲线拟合问题中(也就是回归问题中),MLE蕴含了“最⼩化由公式定义的平⽅和误差函数”的思想,解析如下:
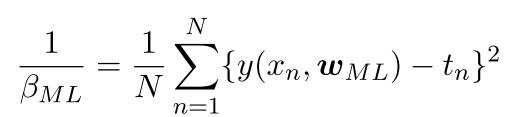
本书中,MLE的对数似然函数的形式:
对于确定w的问题来说,最⼤化似然函数等价于最⼩化由 公式(1.2)定义的平⽅和误差函数。,最⼤化似然函数等价于最⼩化由公式定义的平⽅和误差函数。
进一步,对β(标准差的倒数)求偏导并令其为0求极值,可以得到如下式子:
–》实际上就是 平⽅和误差函数 = =

-
其实我觉得书上没有让我很懂,b站这个讲得不错:
出发点: 我们从概率中的频率学派角度来看看这个问题
结论是:
最小二乘估计实际上蕴含了MLE的思想 【与线性回归模型无瓜】
有高斯噪声的最小二乘估计实际上就是MLE

-
注意,MLE部分构造的损失函数是对数损失函数,推出了最小二乘估计的形式
- 这里是在线性回归的模型背景下推导的,实际上在别的模型下推导是一样的(仔细看下,把wTX换成e^x之类的形式完全不会影响最后的结果 ) 所以与线性回归无瓜,只不过这里讲线性回归的时候正好讲到了最小二乘
- 只能说最小二乘是很适合用于线性回归的,并不是只能用这一种损失函数
-
这里有个不理解的地方就似乎:为什么那里的高斯分布的均值就是wTx
解决了:
这里y满足高斯分布没话说(w和噪声都是高斯), 然后画出的就是这个图,从似然函数角度认为已经发生的事情就是最大概率的,所以这个点对应的y就在y峰值的这条线上
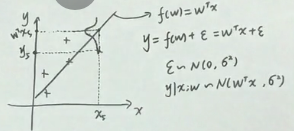
- 同时我们也可以看到,解出来的解析解是这样的:
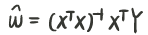
如果当XTX没有逆的情况下就很棘手,所以后面要引入正则化项,保证可以括号内是一个必定能求逆的情况( XTX是一个半定矩阵,半定矩阵加上一个正定的对角矩阵,则为正定,必定可逆)
实矩阵和自己本身的转置相乘得到半定矩阵
MAP详解–Bayesian观点
- P27 在⾼斯噪声的假设下,平⽅和误差函数是最⼤化似然函数的⼀个⾃然结果【曲线拟合问题中(也就是回归问题)】
- 其实MLE和MAP相差不多 只不过MAP是贝叶斯学派 引入了先验概率P(w)
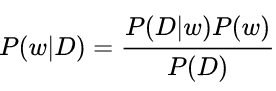
其中的P(D|w)则是似然函数
缺点
-
prior distribution is often selected on the basis of mathematical convenience rather than as a reflection of any prior beliefs。例如常选择conjugate prior ( 共轭先验 )【这个应该是标准贝叶斯的缺点233 】
-
还有值得注意的一点就是:MAP蕴含了“最⼩化期望风险的思想,解析如下:
最⼤化后验概率等价于最⼩化正则化的平⽅和误差函数(之前在公式(1.4)中提 到),正则化参数为λ = α/β。
同样的,这里其实我也没有很懂,b站这个讲得不错:
出发点: 我们从概率中的贝叶斯学派角度来看看这个问题
结论是:
先验分布为均值为0的GD(高斯分布)的MAP就是带有高斯噪声的LSE
那么我们首先就是要求人家的后验,所以就从p(w|y)开始推导起来,其中为了计算方便,给w的分布也设定成N(0,sigma2)

求着求着就发现可以从MAP推导处带惩罚项的最小二乘了。
- 岭回归的参数值就是高斯噪声的方差与先验分布的方差的比值 【然而这两个我们都不知道,但是书p28表明这个式子我们是可以从数据里面推出来的!!!】
- L(w)(loss)改成J(w)是因为此时加上了penalty,再叫成损失函数不太合适了
Bayesian方法面临的主要问题:marginalization计算困难
- 所以MCMC、概率图之列的的motivation就出来了
- 即使有了MAP,也会有些问题

- 即使有了MAP,也会有些问题
tip
- 多维高斯分布的性质在2.3节介绍
- 观测数据集x = (x1,x2,L,xN)T
向量变量 = (x1,x2,L,xN)T
要区分这两个符号 - ML 其实是max likelihood 最大似然
question
- 14 这里w0为什么不加入惩罚项里面 等待挖坟

- 28 超参数的定义是啥 控制模型参数分布的参数又是啥
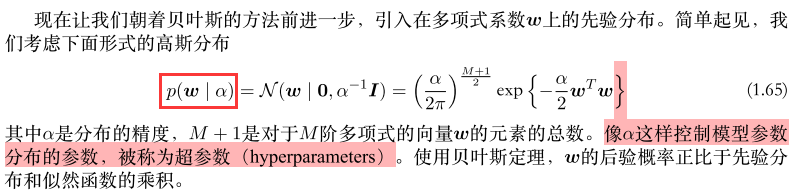
这里方框括起来的不是一个条件概率分布,而是一个概率分布,不过意味着w的分布中有参数用α表示。
然后就引出了超参数的定义
这里的α是一个向量,是w各维度上方差的倒数,又称为精度
- 28 推导
实际上这个是
p(t | ,x,t)= p(t, | ,x,t) d = p(t | , ,x,t) p( |x,t)d = p(t | , ) p( |x,t)d
最后一步是因为 w包含了x和t的信息( 和p( |x,t) 相乘的情况下),这时候信息冗余,就可以把x和t略去不写了

- MLE有误差最小化的思想,MAP有风险结构最小化的思想【看看李航怎么写的】
- 29 流形? 似乎和GAN那些还有点关联 还有自由度的概念= =
- 38 变分法求解
变分法实际上就是: 其中y=f(x)
- 40 那个 咋推导得到的来着
- 42 非均匀分布的比均匀分布的熵要小 --》 有点难以理解了= =
- 1.6.1相对熵和互信息也没看 似乎牵扯到KL散度= =
- recursive Bayes还要仔细看下
第一章剩余知识及补充知识
点估计
由此引出了无偏估计之类的后续概念
- MLE和MAP都属于点估计
变量和参数之间的区别
参数是一个定值,whatever y取什么;而变量也是会变化的,和y一起变化(至于谁影响谁,看情况)
p28 超参数的定义
个人理解 : 控制模型参数分布,是我们人为给定的参数
后验概率的重要性(用处) tl;dr


如何应对过拟合这个缺点
-
常用三种方法:
- 增大数据量
- 使用贝叶斯估计( 会引入先验信息,对数据进行纠正
- 加入正则项 【实际上就是引入先验信息的思想】
- 降维,i.e.特征提取/特征选择
-
频率学派使用两种方法
- regularization 加入正则项
- cross-validation
-
贝叶斯学派使用两种方法;
- 引入先验 【实际上对应的就是加入正则项】
决策 p36
- 分为inference和decision阶段,inference阶段获得了后验概率,决策阶段就根据后验概率进行分类
37 三种方式做出决策
其实觉得知乎这个讲得也很清楚 https://www.zhihu.com/question/20446337
- 生成方法学习到的就是生成模型(SVM、MAP、神经网络) 判别方法学习到的就是判别模型( 朴素贝叶斯、贝叶斯网络之类 )
- 生成式模型 ---- 对联合分布进行建模【贝叶斯 要求分母的积分,实际上P(D)就是P(x,t) [ 同理,P( | ,x,t ) 也可以看作是P( | D ) ],这样一来不同版本之间的知识就能贯通了 】 , 然后得到后验概率(注意,这里的后验概率是P( | D ) ,而不是P(θ|D),我们是通过P(θ|D)求得的P( | D ),在求P(θ|D)这个过程中求了P(D) ),再用决策论将后验概率映射到决策上【这个是最难的 fully bayes】
- 判别式模型 ( poor man’s Bayes) ---- 也要得到后验概率(P( | D ),i.e.P( | ,x,t ) ),但是不需要对联合分布进行建模,相当于对后验概率进行建模 ,输入x输出一个后P( | ),然后再执行decision 部分【MLE属于这种;MAP也属于这种,绕过了分母积分的步骤也就是绕过了积分的步骤 】
- 判别函数 ----不需要对联合分布进行建模,也不需要得到后验概率,直接建立输入到输出的映射 [ 把推断和决策合在一起做了 ]【like神经网络,支持向量机etc】
- 总结:我们很多情况下还是需要获得后验概率的which means 生成式模型is prefered
回归函数的损失函数
我们要求一个y(x)使得ELoss最小,如下:

如果L(t,y(x))采用的是平方和的形式则可以推导出如下形式

1.6 信息论
信息量和熵 很有趣的看法
对于熵的看法很有趣
h(x) 用于定义信息量,其中看出h(x) 应该和p(x)具有如下的关系:

关于信息量的理解 ,我觉得这个说得也很透彻:

那么对于一个随机变量,其传送的信息量大小就是(这里用期望表示 毕竟这是个随机变量啊!):

这个量又被称为随机变量的熵。
用信息量来理解熵真的很棒
一个重要的性质:
从信息量的角度来看,一个很反直觉的结论:非均匀分布的比均匀分布的熵要小

-
43 拉格朗日惩罚项的求解
- 先用拉格朗日乘子把约束方程放到不等式里面去,然后求偏导为0的情况,然后回代到约束条件(方程形式)里面去,可以求得拉格朗日乘子的大小
-
离散熵最大的情况下,对应的分布是均匀分布,那么微分熵最大的情况下呢?
我们把p(x)看作一个泛函,然后利用变分法求解微分熵最大时的p(x),得到p(x)实际上是一个高斯分布
于是我们看看高斯分布的熵到底是什么,得到:
发现 微分熵居然可以是负的(离散熵只能是正的)