import os import torch import torch.nn as nn import torch.nn.functional as F import torchvision from torchvision import transforms from torchvision.utils import save_image # 配置GPU或CPU设置 # Device configuration device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') # 创建目录 # Create a directory if not exists sample_dir = 'samples' if not os.path.exists(sample_dir): os.makedirs(sample_dir) # 超参数设置 # Hyper-parameters image_size = 784 h_dim = 400 z_dim = 20 num_epochs = 15 batch_size = 128 learning_rate = 1e-3 # 获取数据集 # MNIST dataset dataset = torchvision.datasets.MNIST(root='./data', train=True, transform=transforms.ToTensor(), download=True) # Data loader data_loader = torch.utils.data.DataLoader(dataset=dataset, batch_size=batch_size, shuffle=True) # 定义VAE类 # VAE model class VAE(nn.Module): def __init__(self, image_size=784, h_dim=400, z_dim=20): super(VAE, self).__init__() self.fc1 = nn.Linear(image_size, h_dim) self.fc2 = nn.Linear(h_dim, z_dim) self.fc3 = nn.Linear(h_dim, z_dim) self.fc4 = nn.Linear(z_dim, h_dim) self.fc5 = nn.Linear(h_dim, image_size) # 编码 def encode(self, x): h = F.relu(self.fc1(x)) return self.fc2(h), self.fc3(h) # 参数重表示 def reparameterize(self, mu, log_var): std = torch.exp(log_var / 2) eps = torch.randn_like(std) return mu + eps * std # 解码 def decode(self, z): h = F.relu(self.fc4(z)) return F.sigmoid(self.fc5(h)) def forward(self, x): mu, log_var = self.encode(x) z = self.reparameterize(mu, log_var) x_reconst = self.decode(z) return x_reconst, mu, log_var # 构造VAE实例对象 model = VAE().to(device) print(model) # 选择优化器 optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate) #开始训练 for epoch in range(num_epochs): for i, (x, _) in enumerate(data_loader): # 前向传播 x = x.to(device).view(-1, image_size)# 将batch_size*1*28*28 ---->batch_size*image_size 其中,image_size=1*28*28=784 x_reconst, mu, log_var = model(x)# 将batch_size*748的x输入模型进行前向传播计算 # 计算重构损失和KL散度 # Compute reconstruction loss and kl divergence # For KL divergence, see Appendix B in VAE paper or http://yunjey47.tistory.com/43 reconst_loss = F.binary_cross_entropy(x_reconst, x, size_average=False) kl_div = - 0.5 * torch.sum(1 + log_var - mu.pow(2) - log_var.exp()) # 反向传播与优化 # 计算误差(重构误差和KL散度值) loss = reconst_loss + kl_div # 清空上一步的残余更新参数值 optimizer.zero_grad() # 误差反向传播, 计算参数更新值 loss.backward() # 将参数更新值施加到VAE model的parameters上 optimizer.step() # 每迭代一定步骤,打印结果值 if (i + 1) % 10 == 0: print ("Epoch[{}/{}], Step [{}/{}], Reconst Loss: {:.4f}, KL Div: {:.4f}" .format(epoch + 1, num_epochs, i + 1, len(data_loader), reconst_loss.item(), kl_div.item())) with torch.no_grad(): # Save the sampled images # 保存采样值 # 生成随机数 z z = torch.randn(batch_size, z_dim).to(device)# z的大小为batch_size * z_dim = 128*20 # 对随机数 z 进行解码decode输出 out = model.decode(z).view(-1, 1, 28, 28) # 保存结果值 save_image(out, os.path.join(sample_dir, 'sampled-{}.png'.format(epoch + 1))) # Save the reconstructed images # 保存重构值 # 将batch_size*748的x输入模型进行前向传播计算,获取重构值out out, _, _ = model(x) # 将输入与输出拼接在一起输出保存 batch_size*1*28*(28+28)=batch_size*1*28*56 x_concat = torch.cat([x.view(-1, 1, 28, 28), out.view(-1, 1, 28, 28)], dim=3) save_image(x_concat, os.path.join(sample_dir, 'reconst-{}.png'.format(epoch + 1)))
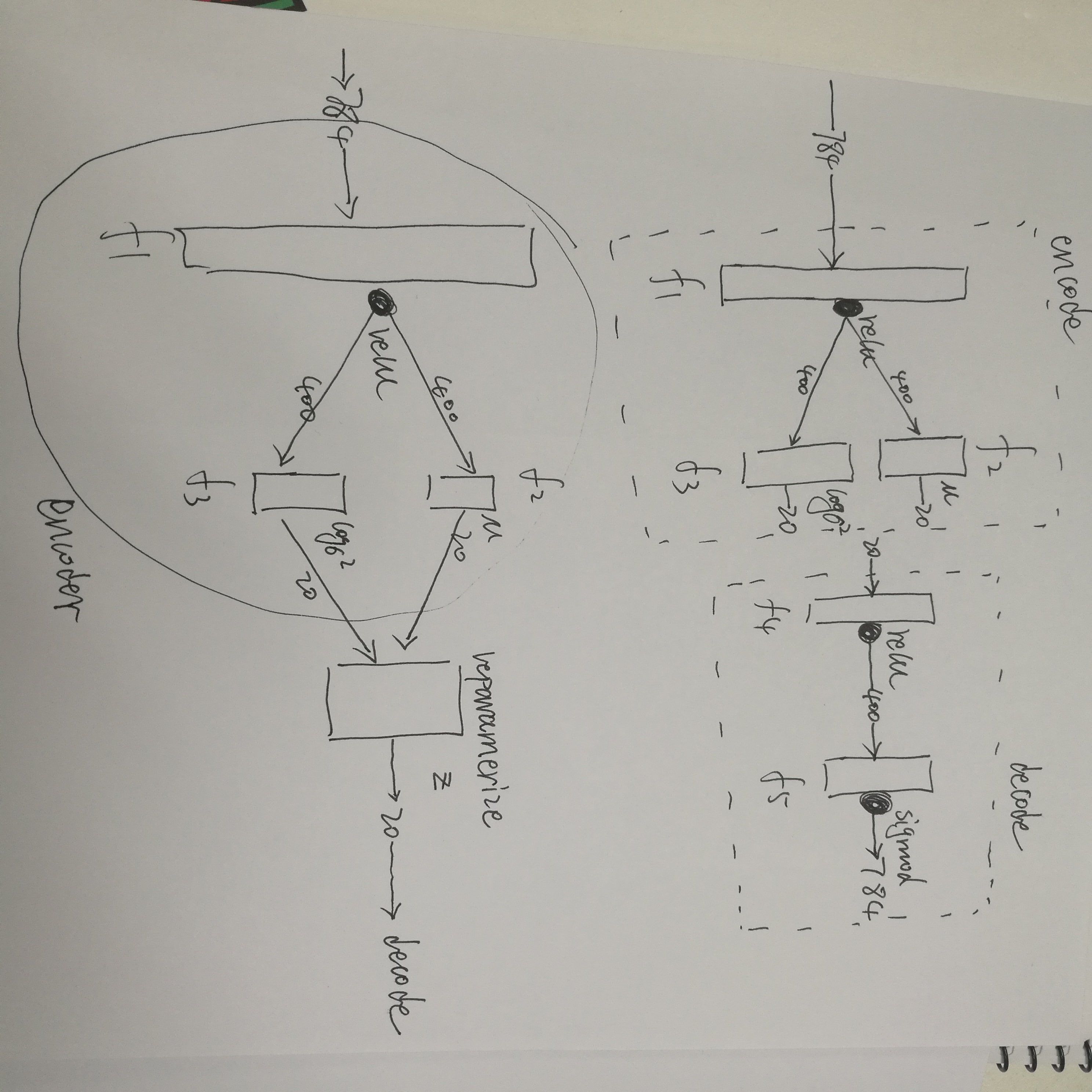
大概长这么个样子:
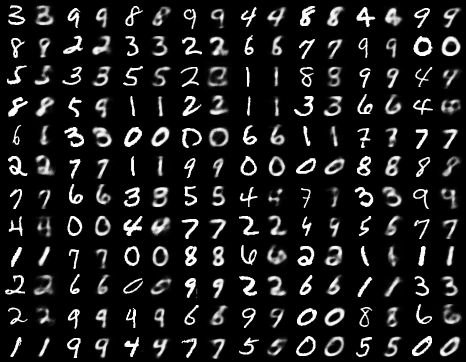
附上一张结果图: