ROS(Robot Operating System)机器人操作系统是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。
说明
ROS有多种版本,在这里就不一 一列举了,有兴趣的可以自行百度了解。在安装时要注意ROS版本是和Ubuntu版本对应的,所以要先了解版本的对应关系。在本教程中我是在Ubuntu16.04安装ros-kinetic-desktop-full版本
ps:如果还没安装Ubuntu,可以参考以下网址:
安装ubuntu 16.04版本
https://blog.csdn.net/gongxifacai_believe/article/details/52444938
更改语言为简体中文
https://blog.csdn.net/qq_19339041/article/details/80058575
安装中文输入法
https://blog.csdn.net/u013947807/article/details/79025499
在给定磁盘容量时,务必分多一点,最好大于20G
以下是ROS的安装步骤。
1.配置 Ubuntu 仓库
点击右上角那个按钮后选择 系统设置 -> 软件软件,弹出如下对话框:
在"Ubuntu软件"的Tab页面,将前面四项都打勾(一般都是默认选上的),并将下载那一栏更改为中国的服务器,如下图所示:

2.添加 sources.list
配置你的电脑使其能够安装来自 packages.ros.org 的软件
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.更新
首先,需要确保包管理器的索引已经更新至最新:
sudo apt-get update
4.安装
推荐安装桌面完整版,这种方式的安装,所需要安装的包非常多。
sudo apt-get install ros-kinetic-desktop-full
5.初始化rosdep
在使用 ROS 之前,需要先初始化 rosdep。rosdep 使得你可以为你想要编译的源码,以及需要运行的 ROS 核心组件,简单地安装系统依赖。
sudo rosdep init
rosdep update
6.环境配置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
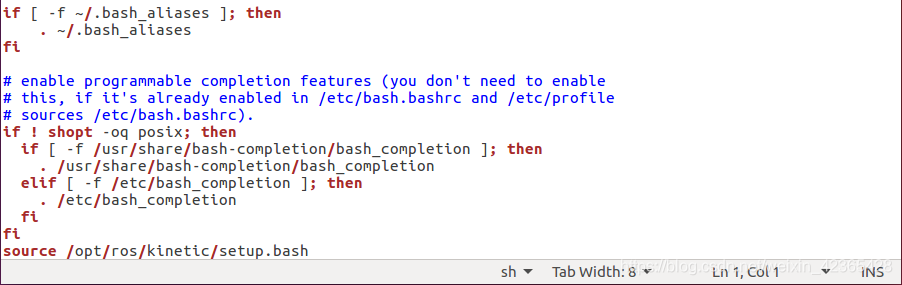
错误:在这一步遇到bash: /opt/ros/kinetic/setup.bash: 没有那个文件或目录
解决方法:在终端输入 gedit ~/.bashrc
在打开文件的最后找到bash: /opt/ros/kinetic/setup.bash
删除重复的多余配置,如果没有多余项查看这句话拼写是否正确,或者与你的ros版本相对应,如图:
7.构建包所需的依赖和测试
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
到现在 ROS 已经安装完成,现在可以做一个简单的测试。可以通过 roscore 和 turtlesim 来做测试。
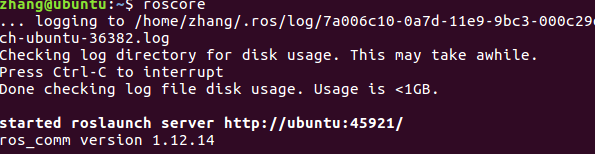
roscore 测试:
roscore
如果有出现版本号。则说明安装成功。如下图:
turtlesim 测试:
turtlesim 的运行依赖于 roscore 的运行,因此在测试 turtlesim 需要同时运行 roscore,所以在测试时要打开另一个终端,输入:
rosrun turtlesim turtlesim_node
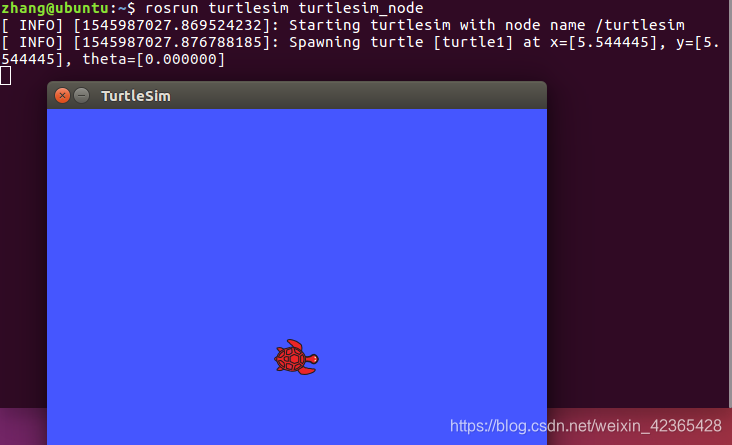
就会在页面显示一只乌龟,是不是很神奇,而且,多运行这条命令,会出现不同的乌龟。
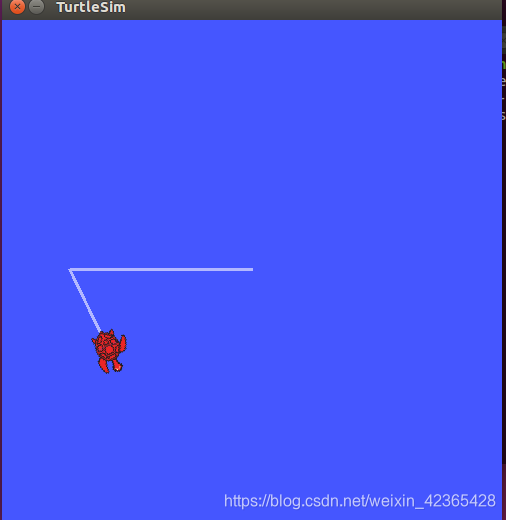
下面再执行命令用键盘控制乌龟走动,再新建一个终端,输入:
rosrun turtlesim turtle_teleop_key
即可通过键盘的方向键控制乌龟走动,此时鼠标的指针要放在新开的那个终端,才能用键盘控制乌龟移动。如图:
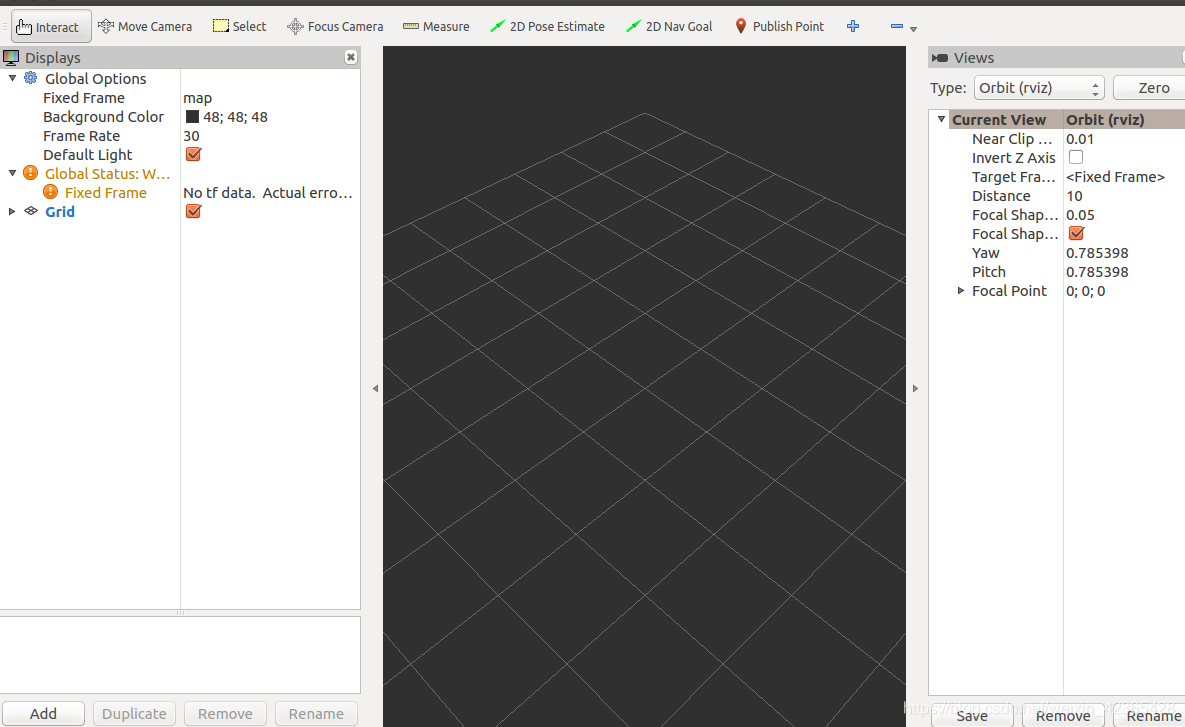
8. rviz 的启动
rviz是ROS中一款强大的3D可视化工具。
rosrun rviz rviz
今天先讲到这里,后续再更新一些ros的基础教程