双边滤波算法在点云数据处理时的应用
简介(摘自百科)
双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折中处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的。具有简单、非迭代、局部的特点 。双边滤波器的好处是可以做边缘保存(edge preserving),一般过去用的维纳滤波或者高斯滤波去降噪,都会较明显地模糊边缘,对于高频细节的保护效果并不明显。
算法原理
在介绍如何应用时,先说明双边滤波算法,由于该算法起初是用于图像的,所以从图像处理开始说起。
因为该算法是针对图像的空间域(spatial domain)和像素范围域(range domain),所以在设计的时候就会有两个权重,Ws和Wr,那么公式就可以简单的理解为:
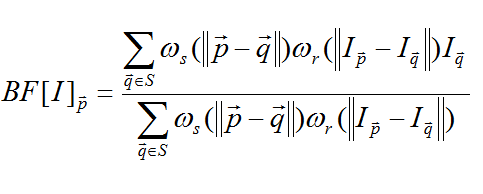
其中p为当前点,之所以是向量,因为有时候图像不只是灰度图像,也有三色图像,所以用向量表示p的多维空间,I则为图像,Ip就是表示图像I的p点,S为p的邻域集,q是邻域中的一个点,BF则为输出的图像。
Ws和Wr的表示如下:
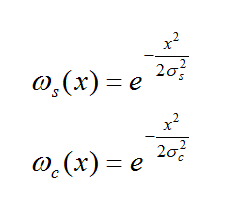
其中σs和σc分别为空域滤波权值函数的标准差和像素相关性权值函数的标准差。
对于双边滤波不只用在图像,很多时候,也会在处理点云数据的时候使用,对点云数据进行光滑处理。(下面公式摘自 崔 鑫《保持特征的散乱点云数据去噪》,刚好在看这篇论文的时候打算整理下双边滤波算法)
双边滤波可以定义为:

p为要处理的点云数据中的一点,n为该点的法向量,λ为双边滤波因子。
λ的计算公式如下:

其中,WC,WS 分别表示双边滤波函数的空间域和频率域权重函数,<n,pj-pi>为n与pj-pi的内积。有了前面的基础,对这个公式理解起来就不难了。在公式得细节上,与前面讲的有些差别,主要是应用的场景不一样,关注的东西也就不一样。