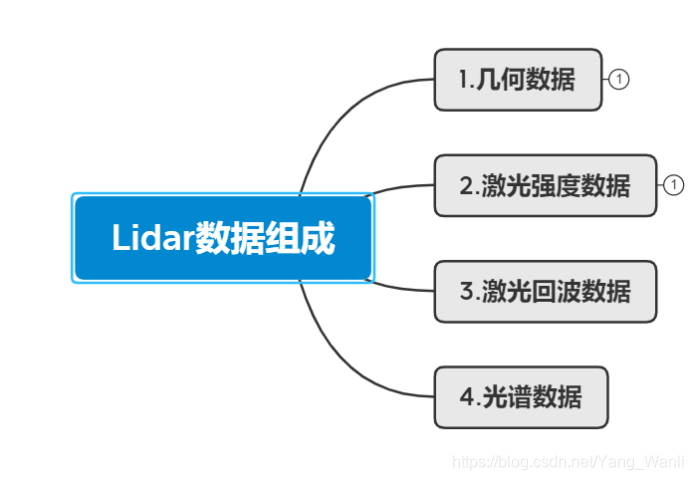
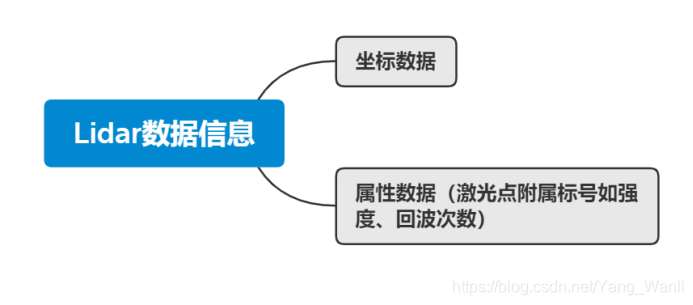
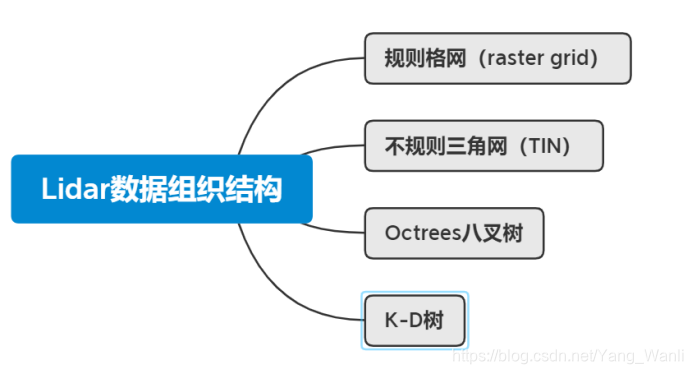
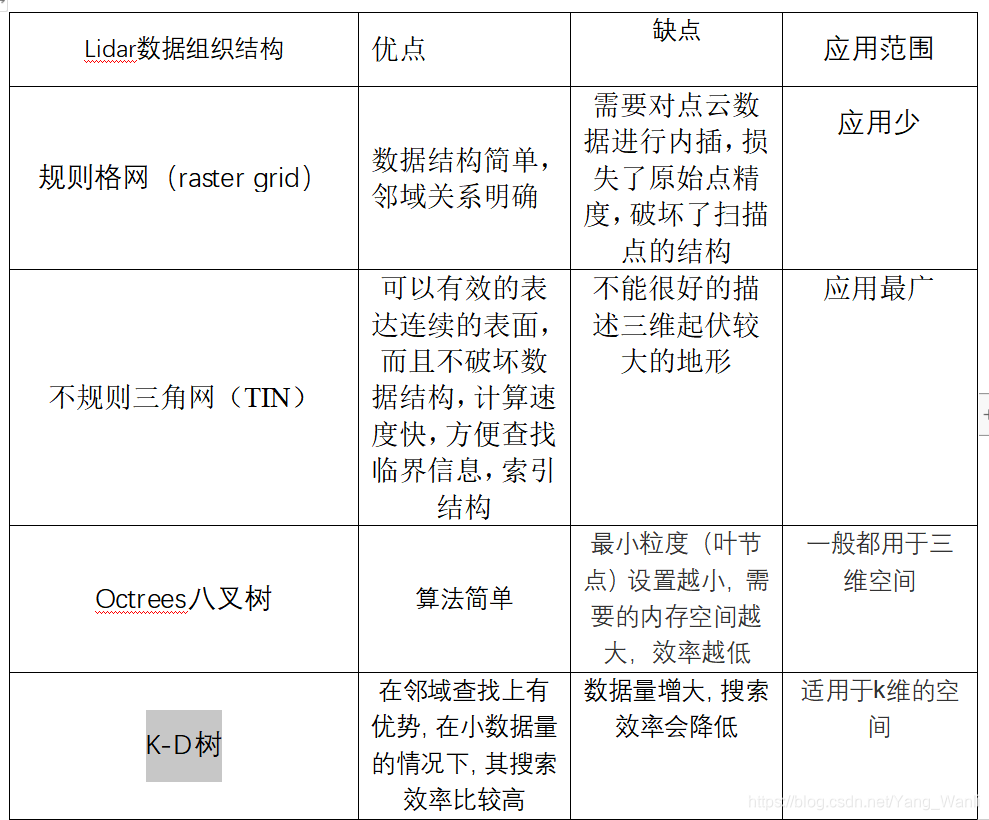
介绍一些常见的本文中涉及的一些数据结构方式:
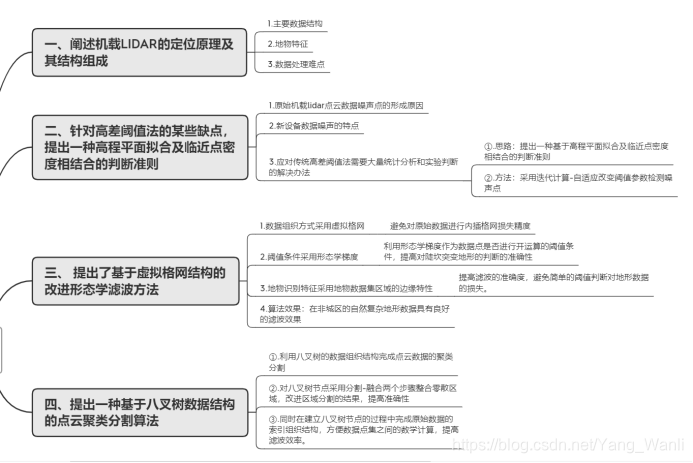
数据处理难点:
1.地物结构复杂,滤波算法判断条件不能适应所有的地形地物特征,导致自动滤波算法总是在某些区域或地形下出现误差,需要人工的干预进行修正。因此研究合理的、快速、准确的自动滤波算法具有重要意义。
2.精度:与摄影测量相比受误差影响因素更多,lidar的高程精度优于平面精度,摄影测量的平面精度高于高程精度
3.地物识别分类方面:缺少点与点间的领域信息,同摄影测量的光谱信息相比地物分类的精度不高
4.成本高,lidar系统设备非常昂贵,还有国内很难买到高精度的IMU(惯性导航器)
1.原始机载lidar点云数据噪声点的形成原因: