版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/woshi_ziyu/article/details/84628638
在本篇文章中,我们将学习旋转编码器的工作原理以及如何将其与Arduino开发板一起使用。旋转编码器是一种位置传感器,用于确定旋转轴的角度位置。它根据旋转运动产生模拟或数字电信号。

有许多不同类型的旋转编码器,可通过输出信号或传感技术进行分类。在本篇文章中,我们使用的特定旋转编码器是增量式旋转编码器,它是测量旋转的最简单的位置传感器。
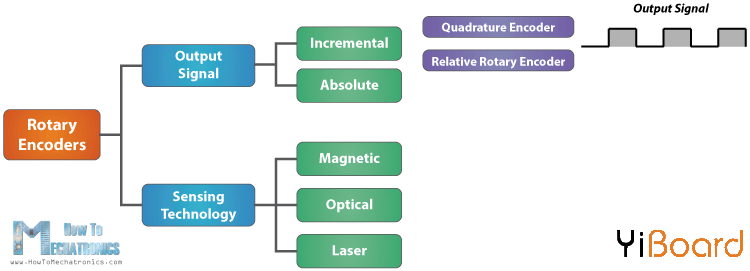
该旋转编码器也称为正交编码器或相对旋转编码器,其输出是一系列方波脉冲。
旋转编码器的工作原理
让我们详细了解编码器,看看它的工作原理。以下是方波脉冲的产生方式:编码器有一个带有均匀间隔的接触区的磁盘,它们连接到公共引脚C和另外两个独立的接触引脚A和B,如下图所示。
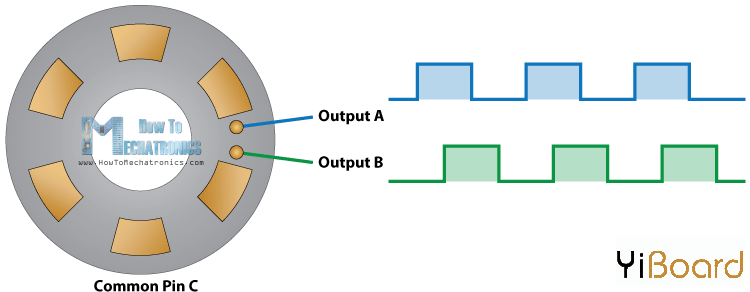
当磁盘逐步开始旋转时,引脚A和B将开始与公共引脚接触,并相应地产生两个方波输出信号。
如果我们只计算信号的脉冲,则可以使用两个输出中的任何一个来确定旋转位置。但是,如果我们想要确定旋转方向,我们需要同时考虑两个信号。
我们可以注意到两个输出信号相互错开了90度。如果编码器顺时针旋转,则输出A将在输出B之前。
更多内容请参考以下链接:https://www.yiboard.com/thread-1001-1-1.html