旋转编码器(Rotary Encoder)是一种帮助用户与系统交互的输入设备。它看起来更像是一个无线电电位器,但它输出一系列脉冲,使其应用独特。当旋转编码器的旋钮时,它以小步进的形式旋转,这有助于它用于步进/伺服电机控制、导航菜单序列和增加/减少数字的值等等。
在本篇文章中,我们将了解不同类型的旋转编码器及其工作原理。我们还将它连接到PIC单片机PIC16F877A,并通过旋转编码器控制整数值,然后在LCD液晶屏1602显示其值。在本文结束时,您将熟悉为项目使用旋转编码器。让我们开始吧…
旋转编码器及其类型
旋转编码器通常称为轴编码器。它是一种机电换能器,意味着它将机械运动转换为电子脉冲,或者换句话说,它将角位置或运动或轴位置转换为数字或模拟信号。它由旋钮组成,当旋转时,旋钮将逐步移动并产生一系列脉冲序列,每次步进具有预定义的宽度。
市场上有很多种类型的旋转编码器,设计师可以根据自己的应用选择一种。最常见的类型如下所示
● 增量型编码器
● 绝对值编码器
● 磁编码器
● 光学编码器
● 激光编码器
这些编码器基于输出信号和传感技术进行分类,增量编码器和绝对编码器基于输出信号进行分类,磁、光和激光编码器基于传感技术进行分类。这里使用的编码器是增量型编码器。
绝对值编码器即使在断电后也会存储位置信息,当我们再次为其供电时,位置信息依然可用。
另一种基本类型,增量型编码器在编码器改变其位置时提供数据。它无法存储位置信息。
KY-040旋转编码器引脚和说明
KY-040增量式旋转编码器的引脚分布如下所示。在本文中,我们将该旋转编码器连接到Microchip公司的微控制器PIC16F877A。
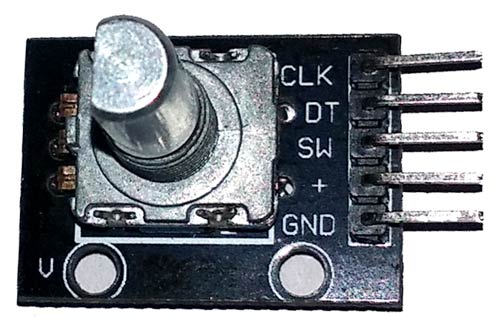
前两个引脚(接地和Vcc)用于为编码器供电,通常使用+ 5V。除了以顺时针方向和逆时针方向旋转旋钮外,编码器还有一个开关(低电平有效),按下内部的旋钮可以按下该开关。来自该开关的信号通过引脚3(SW)获得。最后它有两个输出引脚(DT和CLK),它们产生如下所述的波形。
更多内容请访问以下链接:https://www.yiboard.com/thread-1064-1-1.html