我的博客已全部迁往个人博客站点:oukohou.wang,敬请前往~~
写在前面:记录一下论文阅读的收获,不然怕久远之后,就不记得了~
1. Sum up
S3FD是2017年发表在arXiv上的一篇文章,文如其名,讲的是一个端到端的具有尺度不变性的人脸检测框架,论文主要创新点在于:
- 提出了一个适用于不同尺度大小的人脸的检测框架;
- 通过锚框匹配策略改进了小尺度人脸的召回率;
- 通过“最大者胜(max-out)”的背景标签降低了假阳性率(FPR);
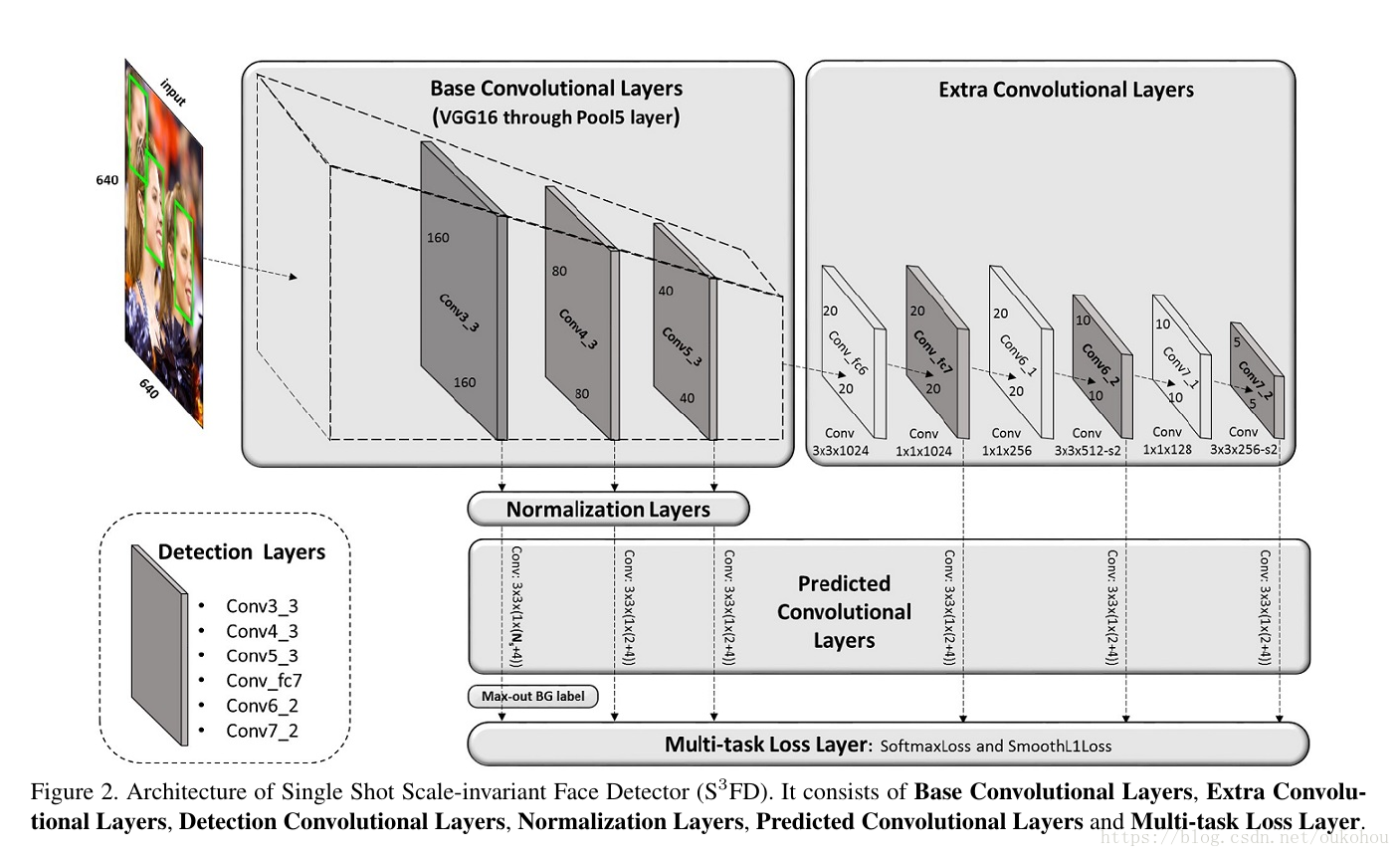
网络架构如图所示:
2. What’s up?
论文首先针对三个创新点抛出了基于锚框检测算法的几个弊病:
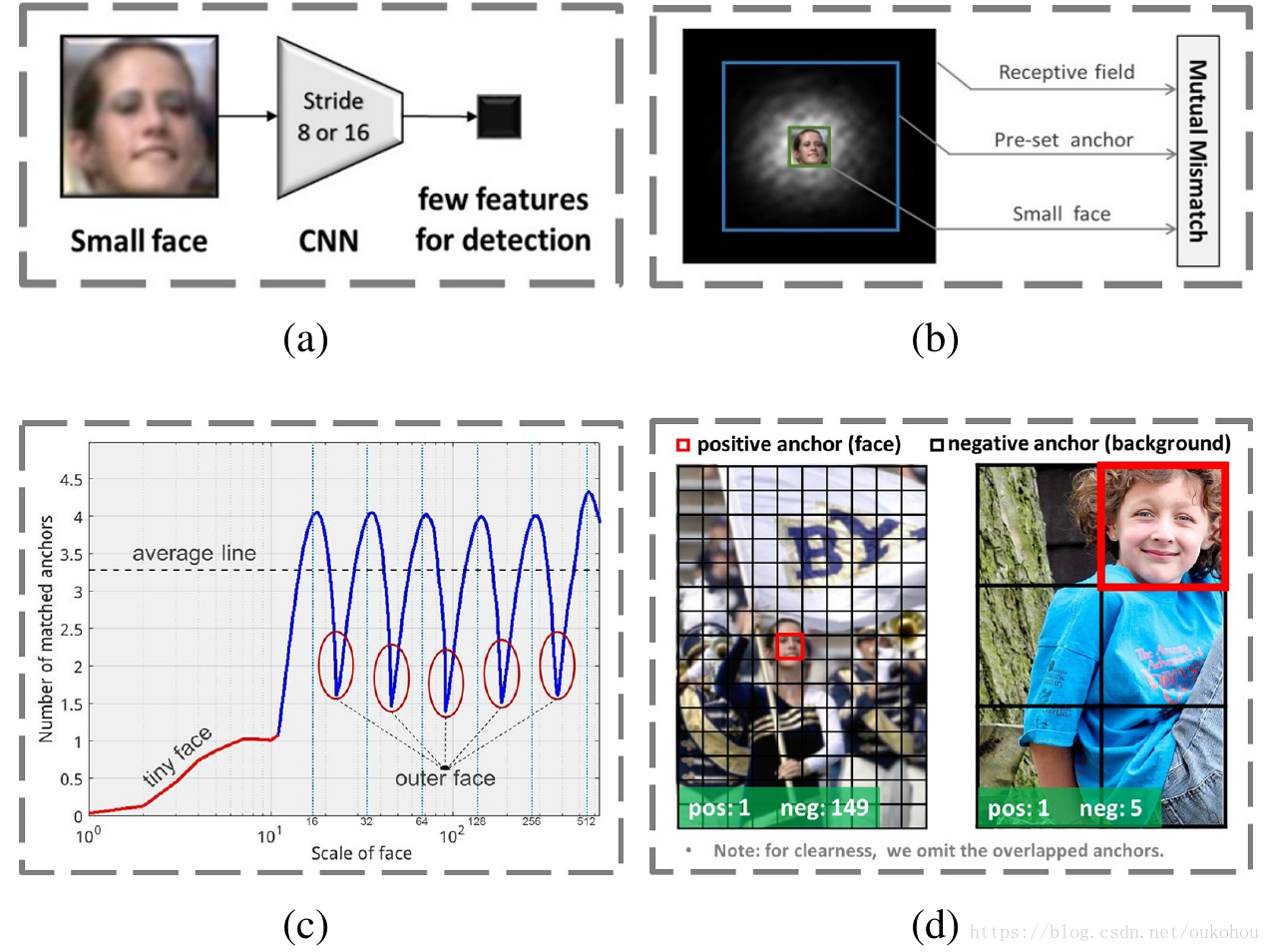
- 如图(a)所示,对于检测层网络来说,步长对应的感受野较大,小尺度人脸能够表达出的特征少之又少;
- 如图(b)所示,锚框与感受野的大小不能很好的匹配,同时锚框、感受野都不能很好的匹配到小尺度人脸区域;
- 如图©所示,由于锚框大小实际上都是固定的,所以落在这些固定大小之外的人脸就不能很好的检测到;
- 如图(d)所示,如果想要检测到小尺度人脸,相对于大尺度人脸,那么就注定会有更多的小尺度、不包含人脸的背景锚框。
以上几点是论文所提出的问题,也就是论文创新点所重点关注和改善的几个地方,下面一一道来。
3. S3FD
3.1 怎么能让网络适用于不同尺度的人脸?
答案很简单:既然不同尺度的人脸在同一层上的特征区域不同,那么又何必强求呢?道不同,不相为谋,在不同层上分别进行检测就是了。
当然,理想很丰满。为了实现这一理想,就要做些骨感的工作:
首先要建立一个很骨感的网络,也就是开头那张图。以防大家一下就忘了,再放一次:
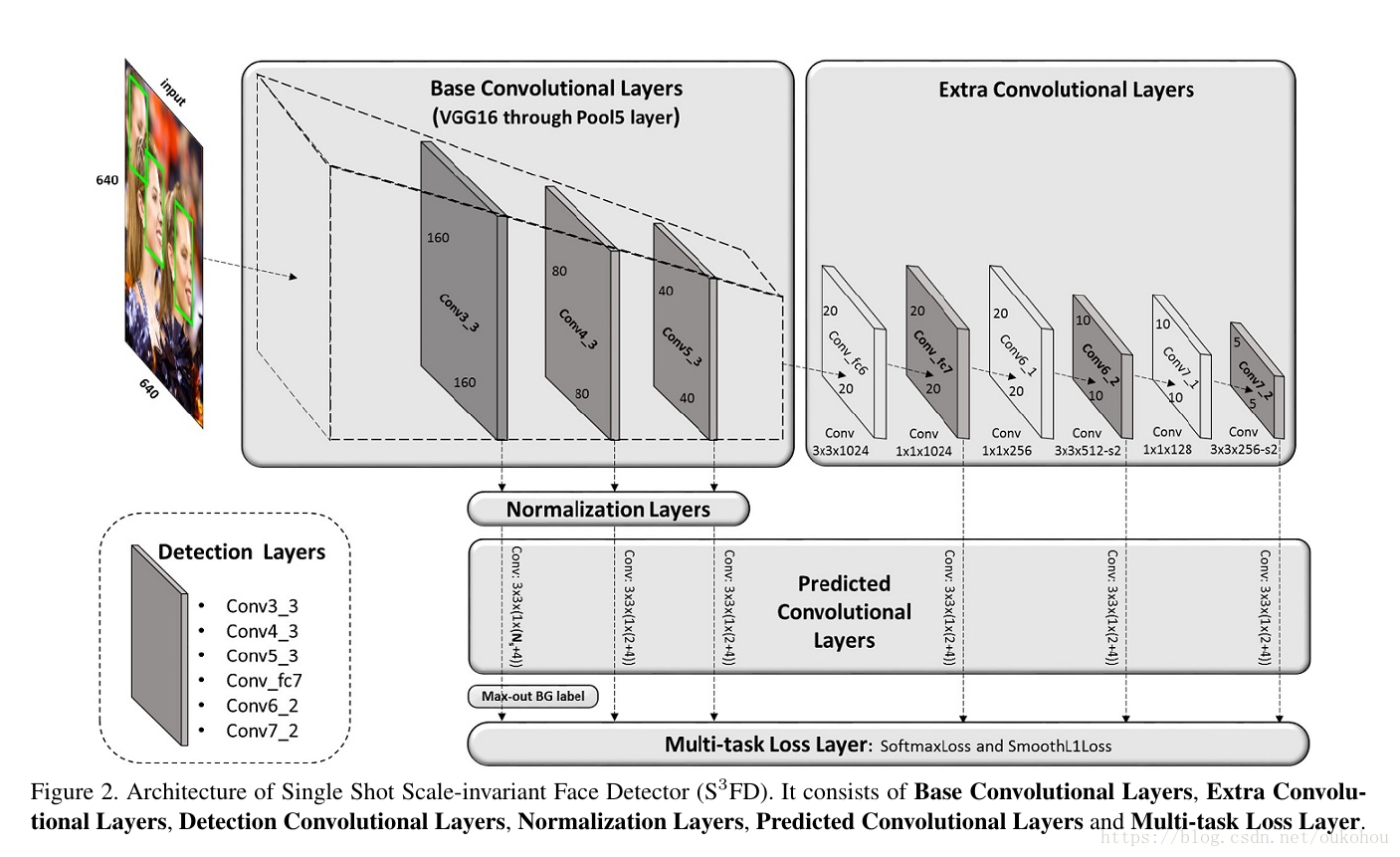
这张图有什么玄机呢?
使劲瞅,用力看:
- Base Convolutional Layers 这个方框内用的是VGG16的框架,不过只取到了Pool5层;
- Extra Convolutioal Layers 原本应该是VGG16的全连接层fc6、fc7被换成了卷积层,当然我们知道,通过设计卷积层卷积核大小与前一层特征图相等,也能实现全连接的功能;同时后面也额外加上了4层卷积层,看来这是要搞大事情呀;
- 左下角的Detection Layers就是一个抽象的概念了,其实就是Base、Extra方框内的一些卷积层被指派为检测层了,不知道其他没被指派的卷积层会不会感到失落呢;
- Normalization Layers:这个图上没标,其实就是对Base方框里被选中的几个检测层进行了L2 normalization;
- Predicted Convolutional Layers 也是人如其名,就是预测层了,其中每个卷积层分别承担着不同尺度的人脸的检测任务,分别预测锚框的偏移量和所属类别的置信率;论文所声称的适用于不同尺度人脸的功能就是这样实现的了;
- Max-out BG label:为了雨露均沾,还是提一下这个框框,这个就是专门为了Con3_3而设计的了,目的是筛选出大部分的背景锚框;
- Multi-task Loss Layers:就是损失层咯,分类用softmax loss,回归用smooth L1 loss。
以上,终于把这个十分骨感的网络讲完了,下面就是一点一点地实现我们丰满的理想了。
How about anchors’ scales?
那么问题来了,前面说了不同层上检测不同尺度的人脸,这个“不同尺度”,也就是不同层的锚框大小该怎么定义呢?
首先的直觉是:因为人脸区域的标定框一般都是正方形,所以锚框也定义成正方形,长宽比1:1。
OK,那么关键的,这个长、宽到底应该是多少呢?取决于两个因素:
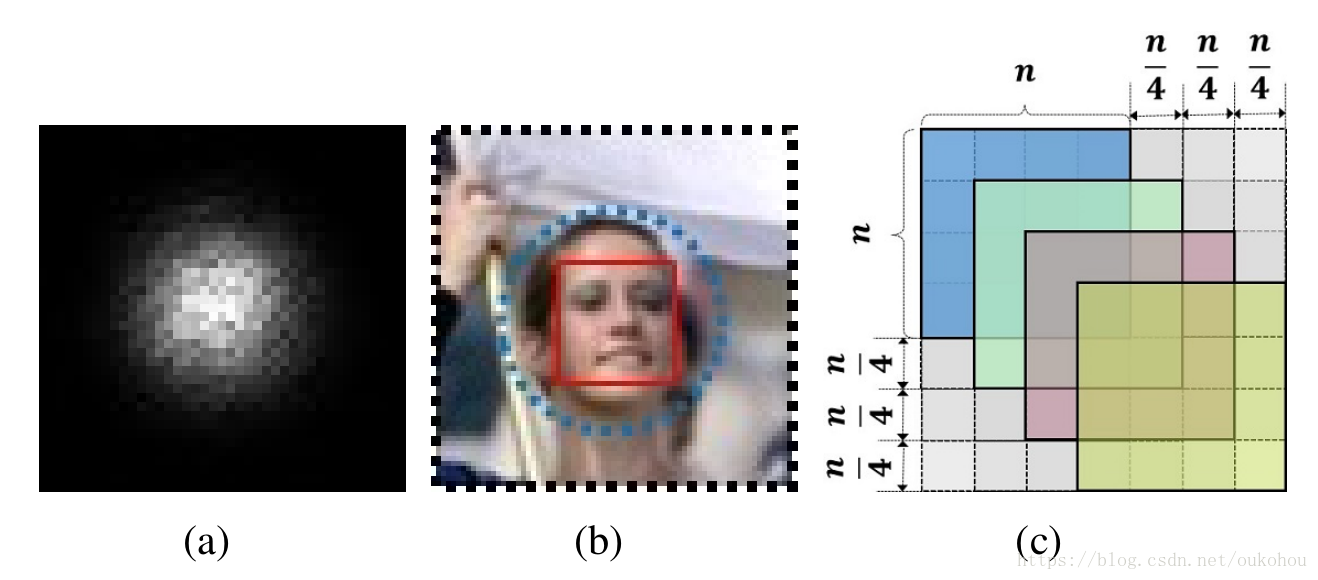
- 有效感受野
啥叫有效感受野?看图说话:
只看图(a),对于整个黑色方框来说,其整体是一个理论上的能够对最终输出产生影响的感受野,也就是大家通常意义上所理解的感受野,真~感受野,那么有效感受野就是图中心的白色点点,这些是实际上能够对最终输出产生影响的区域,也就是所谓的有效感受野,真~真~感受野。因此,在图(b)中,黑色虚线框是正常的感受野,蓝色虚线圆就是我们的有效感受野,而红色实线框就应该是我们的锚框的大小; - 等比例间距原则(Equal-proportion interval principle)
这又是啥?不要着急,君且安坐,听我一言:
看图©,锚框移动的步长是n/4,那么固定锚框是n×n的,于是这就成了我们的等比例间距原则:不同尺度的锚框在图像上都有相等的密度,从而使得不同尺度的脸能够大体上匹配到相等数量的锚框。
为了能够实现我们的丰满理想,还真是操碎了心啊。
3.2 尺度补偿锚框匹配策略(Scale compensation anchor matching strategy)
所谓锚框匹配,也就是在训练过程中如何确定哪些锚框是匹配到人脸了的,而哪些没有。
一般来说,锚框匹配首先匹配那些与标记好的人脸有最好IOU交并比的锚框,然后匹配那些与任意人脸的IOU交并比大于某个临界值的锚框。有点绕,但确实如此。就是先按照预先标记好的人脸区域匹配最好的锚框,然后从众多生成的锚框区域中来匹配次好的锚框。
但是陈独秀同志又有话说了,看图:
我们知道,众多图像中的人脸区域大小应该是连续分布的,但我们的锚框大小却是一些固定的值。图(a)中蓝虚线,当锚框是固定值(16, 32, 64, 128, 256, 512)的时候,可以看到,与这些值都不接近的人脸区域不能够很好的被匹配到,尤其是小人脸部分,效果微乎其微。
据此,文章提出了尺度补偿锚框匹配策略:
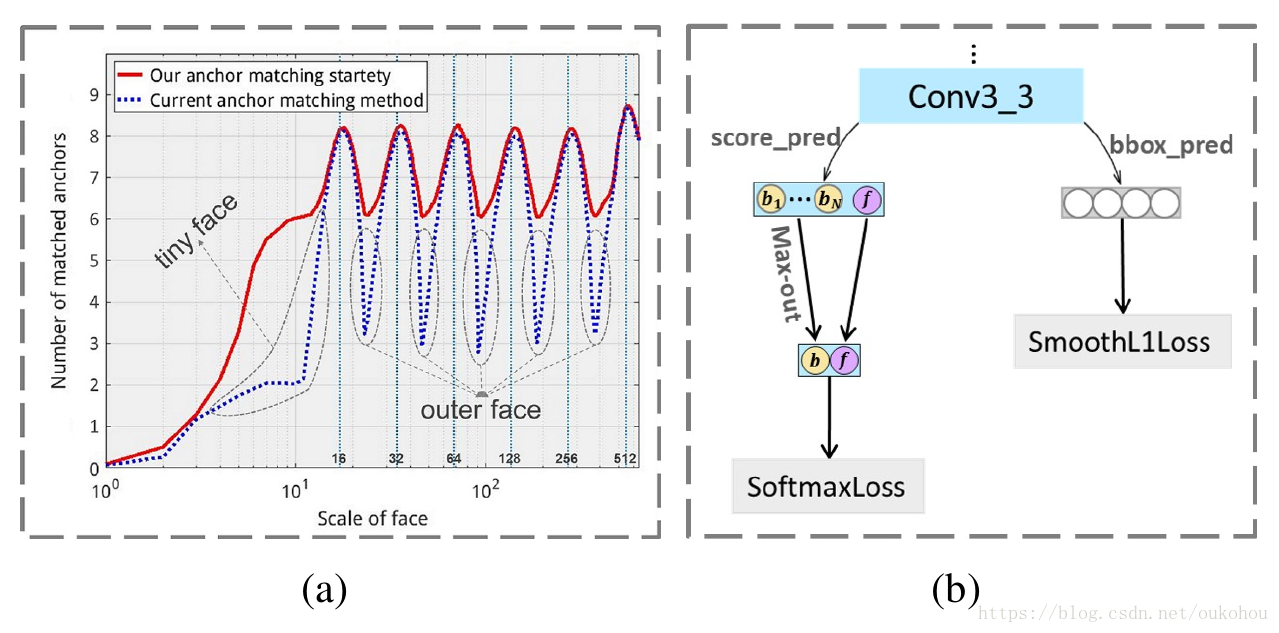
- 降低锚框匹配的临界值,一般是0.5, 这里改为0.35,以提高每个人脸框所匹配到的锚框数量;
- 针对依然没有被匹配到的人脸区域, 将阈值改为0.1,然后选择匹配比最高的N个锚框进行匹配;
经过这一该进,效果显著,就是图(a)中的红实线了。
3.3 “最大者胜”的背景标签(Max-out background label)
首先,啥是背景标签?很简单,对于人脸检测,锚框区域如果包含人脸,那么就是正例,如果不包含人脸,那么就是负例,也即背景标签。
对于基于锚框的检测方法来说,有一个问题:
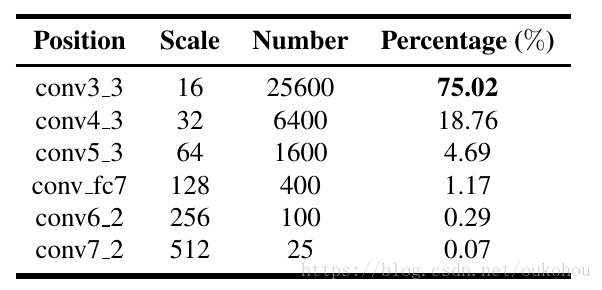
比如本文中所述的方法,对于一张640*640的图像,其总共产生了34,125个锚框!仅conv3_3就贡献了超过75%的尺度大小为16×16的锚框!
这可如何是好呀?
于是就到了3.2中图(b)的做法了:对于每个匹配到的锚框,同时预测其一系列背景锚框,然后选择其中置信率最高(max)的一个作为负例,也即Max-out。其实这就是一种局部优化方法,以此来减少假正率。
4. The end, and flowers!
以上,就是S3FD如何提出了一个丰满的理想,并一步一步骨感地实现它的过程。
论文在提出之时在各大人脸检测榜上刷出了较好的成绩,wider face、FDDB、AFW等,当然,截止到现在(2018-09-13 10:09:06)是又被其他方法给顶了下去。果然是打江山容易,守江山难啊~~
最后放上一张大家都爱放的检测效果图,也是S3FD论文中的检测效果图:
这张图据说共有1000张脸,S3FD方法检测出了853张。
不要惊奇,不要讶异,百度的Pyramidbox检测出了880张~~当然,这是后话,不在本文讨论。

5. The real end,and FLOWERS!
完结撒花。
你的赞是我最大的动力!
以及个人私货时间:
github :oukohou
my site:oukohou.wang
e - mail:[email protected]
wechat official account: oukohou
Scan and we’ll see.