原链接: https://community.bwbot.org/topic/526
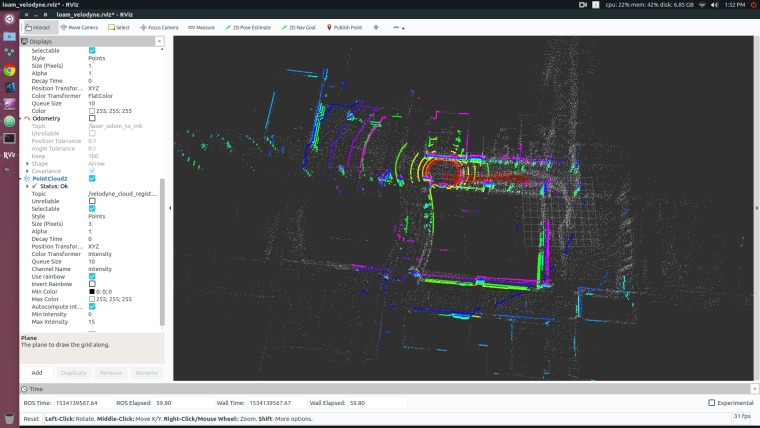
loam_velodyne 是业界比较有名的一个3d 激光雷达slam包,它不以常规的3d icp策略而以3d雷达点云特征点为主要匹配方式结合IMU,实现实时地计算高精度的6自由度激光雷达里程计,在此基础上再结合3d icp得到高精度地图点云数据。
1. 数据包准备
loam_velodyne包原始作者是针对vlp-16激光雷达设置的,我们测试发现它对其他平台的IMU数据兼容性不好,在下文的建图过程,我们只使用速腾聚创3d激光雷达输出的三维点云数据进行测试,不使用小强开发平台的IMU。
测试结果发现因为没有IMU,loam_velodyne对剧烈晃动、快速转向适应性差,为了得到好的结果,需要保证运动的平稳、匀速。同时雷达输出点云的速率提升到20HZ后,slam效果也有提高。20hz的设置需要使用windows配置软件设置。
rosbag数据包的详细制作过程,请参考这篇教程: https://community.bwbot.org/topic/522/使用rosbag录制和回放3d激光雷达数据和小强ros开发平台的里程计imu数据
下文教程将以蓝鲸机器人录制的bag包为例,演示如何建立2d地图。bag包百度云下载地址
2. 配置安装loam_velodyne
#需要安装到ros工作空间,以小强主机为例
cd ~/Documents/ros/src
git clone https://github.com/BluewhaleRobot/loam_velodyne.git
cd ..
catkin_make3. 启动loam_velodyne 开始建图
#先关闭小车的ros启动节点
#在小车主机上新开一个命令终端
sudo service startup stop
roscore#启动loam节点
#在小车主机上新开一个命令终端
roslaunch loam_velodyne xiaoqiang_lungu_off.launch#播放bag数据
#在小车主机上新开一个命令终端
rosbag play -s 200 2018-08-11-13-20-34.bag #从200秒开始播放数据,这段数据比较好