原链接: https://community.bwbot.org/topic/524
谷歌cartographer_ros请参考这篇安装教程:http://community.bwbot.org/topic/136/google激光雷达slam算法cartographer的安装及bag包demo测试
1. 数据包准备
使用激光雷达进行2d建图,一般是使用2d雷达数据,3d雷达需要先转换成2d。cartographer_ros的2d建图直接支持三维点云输入,因此可以不需要转换。本文建图将使用里程计和三维点云数据。
rosbag数据包的详细制作过程,请参考这篇教程: https://community.bwbot.org/topic/522/使用rosbag录制和回放3d激光雷达数据和小强ros开发平台的里程计imu数据
下文教程将以蓝鲸机器人录制的bag包为例,演示如何建立2d地图。bag包百度云下载地址
2. 配置cartographer_ros
蓝鲸机器人github上的cartographer_ros已经配置好了所有文件,对于加装速腾聚创小强xq5开发平台采集的数据包,cartographer_ros需要使用的是下列文件,简略的说明在下文。cartographer_ros的详细文档可以参考官方wiki
cartographer_ros/launch/demo_xiaoqiang_rslidar_2d.launch #建图时启动的launch文件,负责启动rviz,加载cartographer_ros主要的启动节点和参数文件,话题数据名字的remap也在这个文件设定。
cartographer_ros/urdf/rslidar_2d.urd #模型文件,用来发布3d激光雷达、小车里程计、IMU、小车本体之间的tf关系
cartographer_ros/configuration_files/xiaoqiang_rslidar_2d.lua #cartographer_ros算法参数配置文件,优化建图效果需要调整的参数就是这个文件。ros中坐标系的设置,请参考这篇教程,小强xq5平台的base_link原点设置在两个主动轮轴中间位置。
# cartographer_ros/configuration_files/xiaoqiang_rslidar_2d.lua文件里面设置是否使用imu、odom数据的参数是这两个:
use_odometry = true #true使能里程计,false禁用里程计
TRAJECTORY_BUILDER_2D.use_imu_data = false #true使能里程计,false禁用里程计# cartographer_ros)/urdf/rslidar_2d.urd文件需要调整的参数是3d雷达相对base_link的安装位置,laserbase_link等价于base_link
<joint name="horizontal_laser_link_joint" type="fixed">
<parent link="laserbase_link" />
<child link="rslidar" />
<origin xyz="0 0 0.4" rpy="0 0 0" />
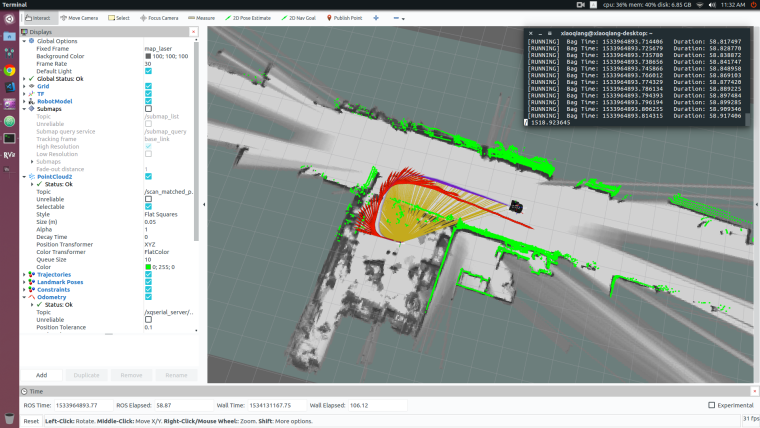
</joint>3. 启动cartographer_ros,播放rosbag数据包,开始建图
#先关闭小车的ros启动节点
#在小车主机上新开一个命令终端
sudo service startup stop
roscore#启动cartographer
#在小车主机上新开一个命令终端
roslaunch cartographer_ros demo_xiaoqiang_rslidar_2d.launch #播放bag数据
#在小车主机上新开一个命令终端
rosbag play --clock 2018-08-11-13-20-34.bag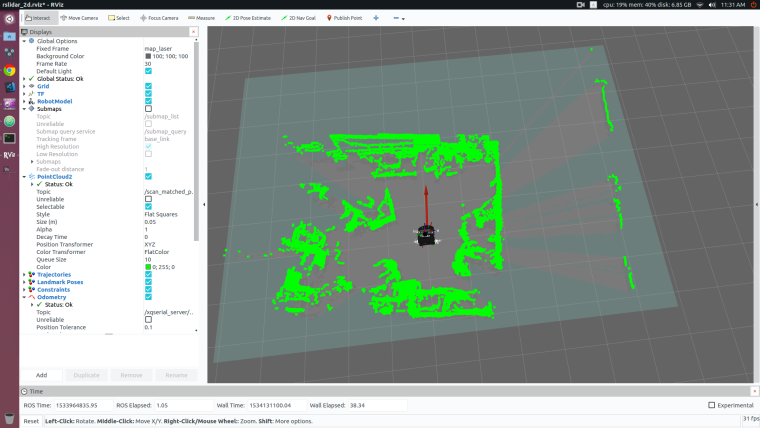
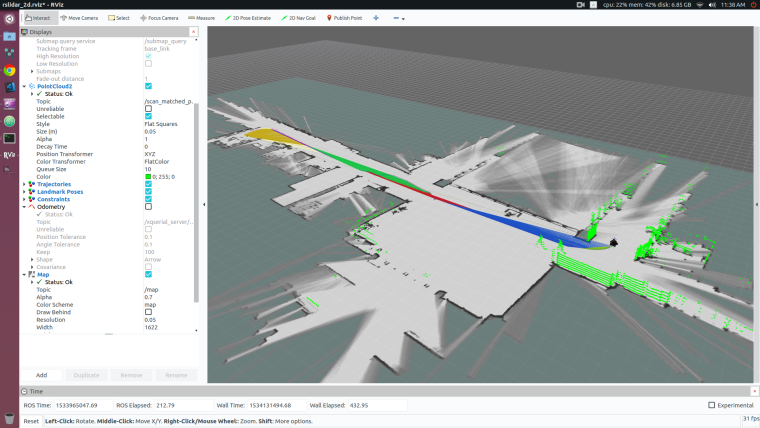
4. bag播放完成后,用map_server保存地图
rosrun map_server map_saver --occ 51 --free 49 -f work0保存成功后,会在home目录里面生成work0.yaml work0.pgm两个地图文件,这两个文件可以用来amcl导航。