Ubuntu18.04使用速腾16线激光雷达RS-16测试3D建图算法 A-LOAM 的使用
运行环境
- Linux:Ubuntu18.04
- ros:Melodic
- Ceres Solver 2.0.0(Ubuntu18.04安装Ceres)
- PCL 1.8.1(Ubuntu系统的PCL、Eigen卸载和安装)
- 测试使用 Ubuntu18.04 + ROS Melodic 搭建
LOAM的3D建图过程中没有测试成功
遇到的报错原因[multiScanRegistration-2] process has died,经过对 PCL库 和 Eigen库 的版本升降也没有成功
1. 新建ROS工程目录文件夹,下载源码进行编译
- 新建工程文件
mkdir catkin_ws
cd catkin_ws
mkdir src
catkin_make
- 下载源码,进行编译
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git
cd ../
catkin_make
source /devel/setup.bash
2. 下载数据集进行测试
数据集名字:nsh_indoor_outdoor.bag,大小:780M左右
数据集下载地址:https://drive.google.com/file/d/1s05tBQOLNEDDurlg48KiUWxCp-YqYyGH/view
运行rosbag play命令进行测试数据集,其中<YOUR_DATASET_FOLDER>是下载对应数据集包的文件位置
source /devel/setup.bash
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
rosbag play <YOUR_DATASET_FOLDER>/nsh_indoor_outdoor.bag
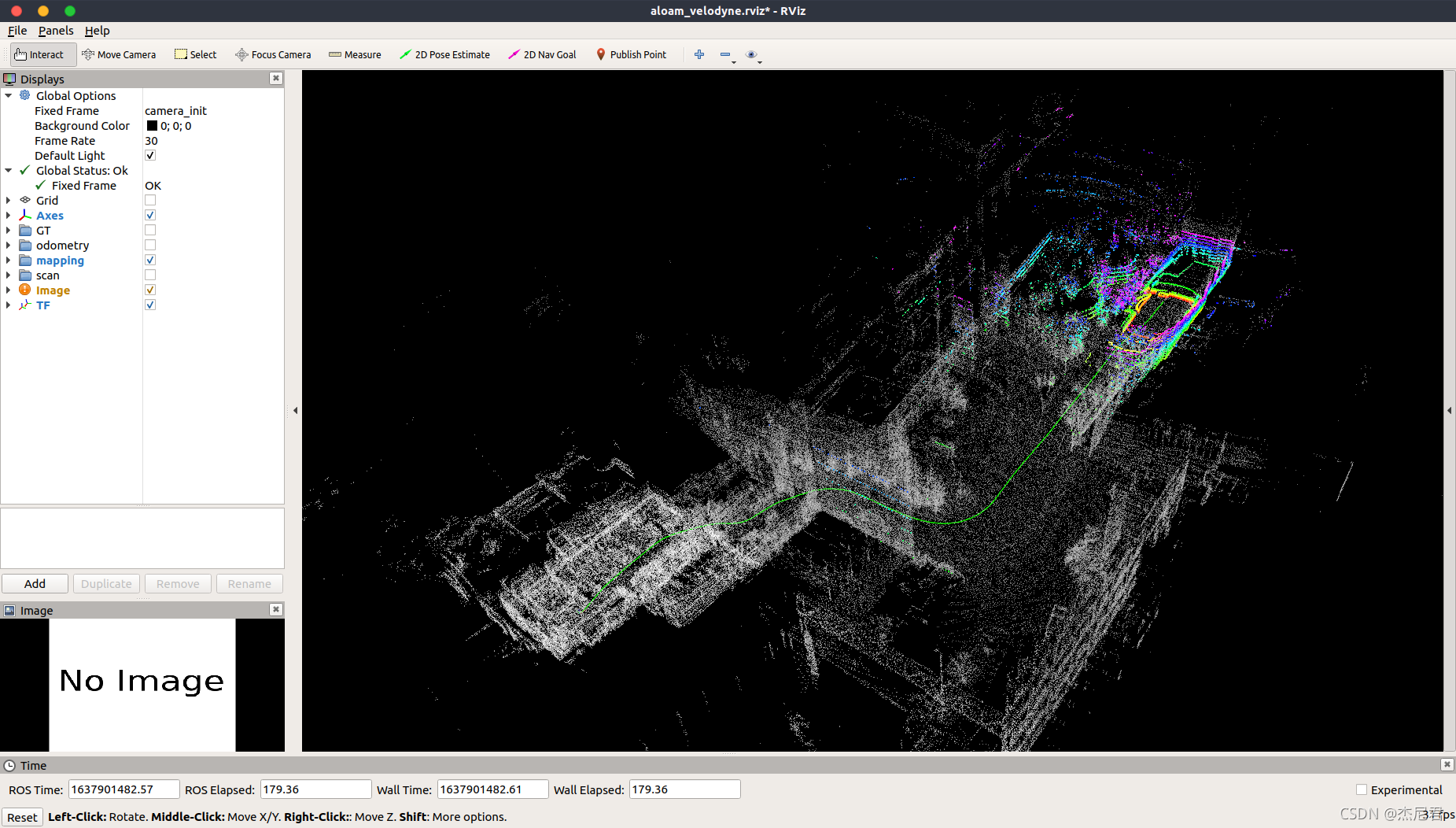
运行数据集的测试结果,其中绿色线为雷达的行进轨迹线
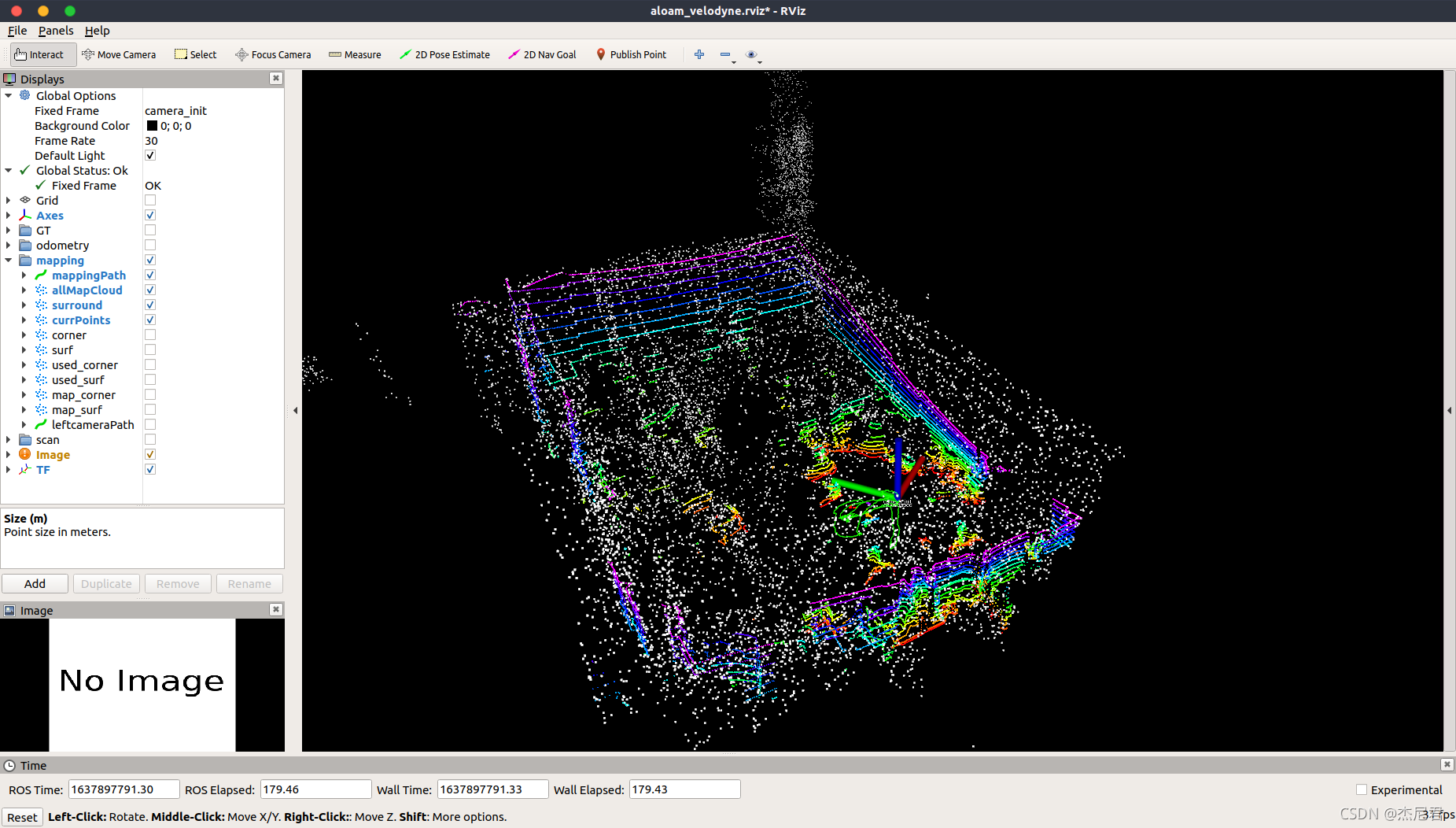
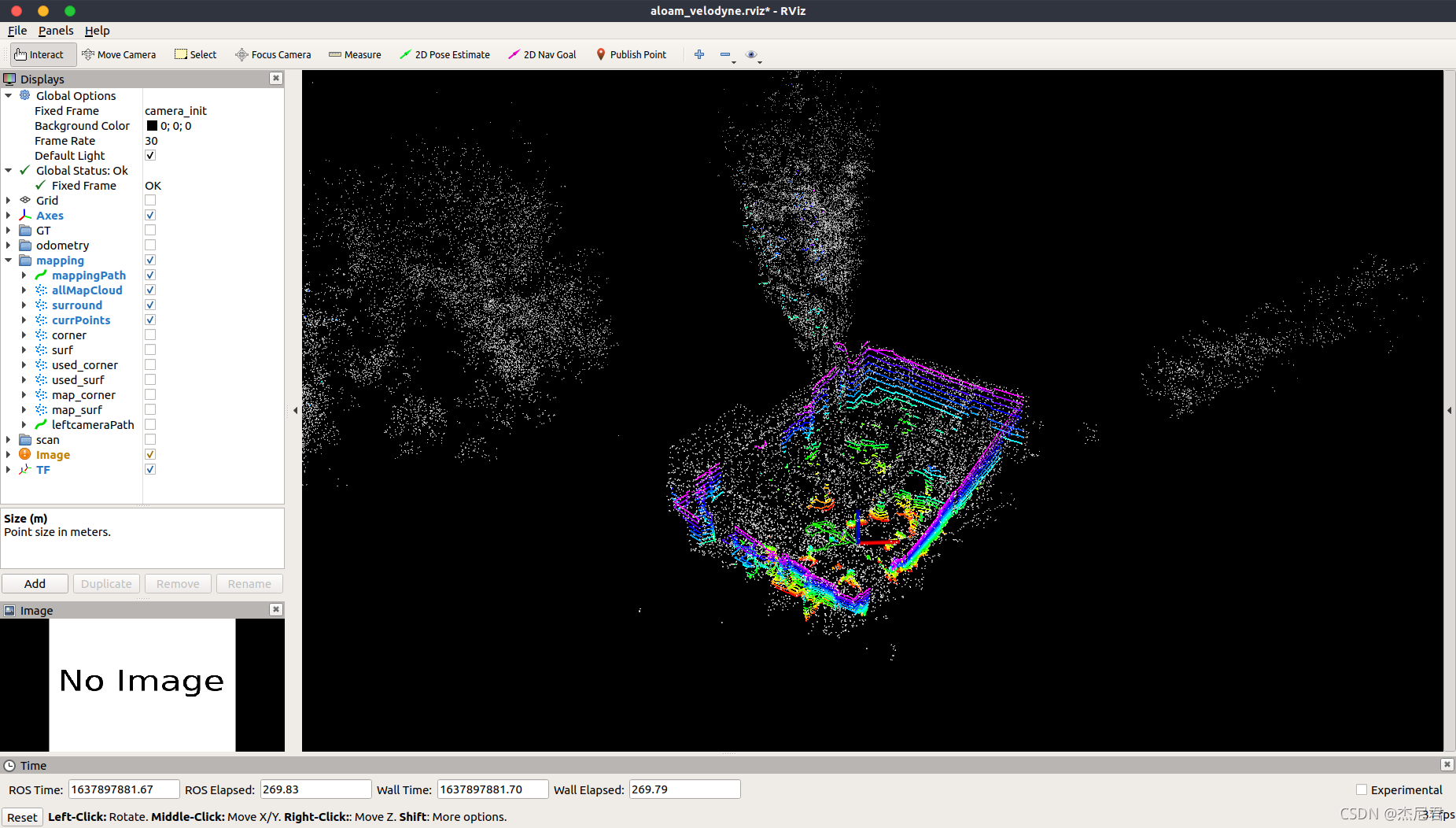
3. 使用速腾16线激光雷达RS-16进行3D建图算法A-LOAM的使用
3.1 下载rs雷达话题转velodyne雷达话题源码
- 方法一:
下载地址:https://github.com/HViktorTsoi/rs_to_velodyne.git
并编译,可放在同个工作空间编译
- 方法二:使用 git 下载
cd ~/catkin_ws/src
git clone https://github.com/HViktorTsoi/rs_to_velodyne.git
cd ../
catkin_make
3.2 连接雷达,进行数据测试
source /devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
rosrun rs_to_velodyne rs_to_velodyne XYZIRT XYZIRT
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
测试结果图如下: