Perceptron Hypothesis Set
Perceptron : 感知机
对于一个假设h(x),结果与权值w和阈值threshold有关。
sign(x)函数表示:sign(x > 0) = +1, sign(x < 0) = -1。

对二元的h(x),形成如下线性分类:

由此,感知机模型成为了一个线性(二分)分类器(linear/binary classifiers)。
现在的问题是,如何得到这条直线??
Perceptron Learning Algorithm
“知错就改”的方法——PLA

这个方法即是通过不断用错误点来修正feature vector,从而让不断接近理想的
。
但是要证明这一点要回答两个问题:为什么这样做能不断接近目标?这样做是否能够终止?
Guarantee of PLA
首先能想到的是,data必须线性可分,否则将永远找不到那个满足条件的直线。
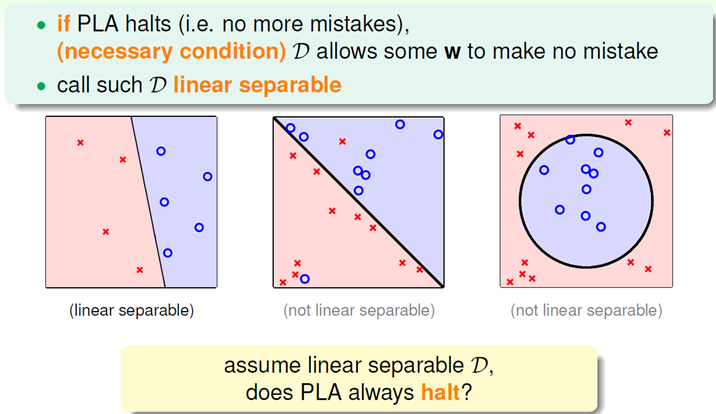
但是,如何判断是否线性可分,课程中说这是一个NP-hard Problem,没有好的方法。

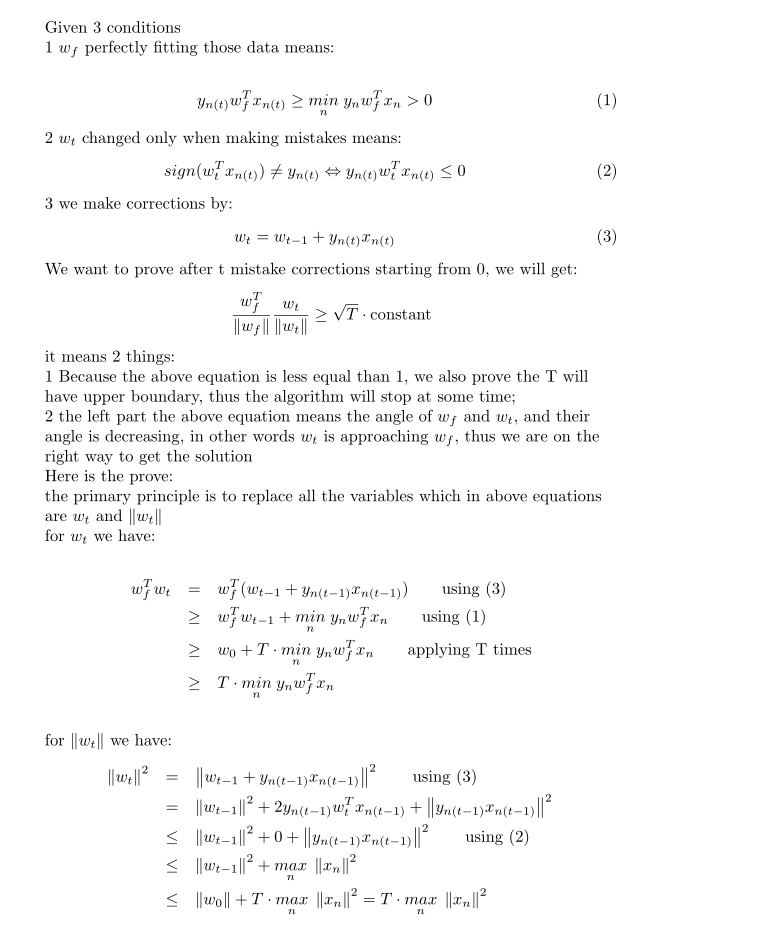
上图旨在证明随着correct的进行,不断接近于
,趋近于目标。(这里用向量的内积来表示接近程度)
但是有一个问题:内积严格单调递增,并不一定表示两个向量的夹角就是在减小,有可能是向量的模变大了,以下就解决这个问题:

由此可以知道的是,的增长不会太快,而
又不断接近于
,算法会达到终止。
以上的证明,参考了网上的其他资料,有比较详细的过程,下面的Latex过程来自于HappyAngel的博客笔记:

Pros and Cons of PLA

那么在Data含有噪声(含有线性不可分点)的时候怎么办呢?
Pocket Algorithm
这是一个解决数据噪声的贪心方法,在当前保持最小的mistake,完成足够迭代后获得最优解。
