Abstract
整篇论文利用边缘来辅助landmark点的定位
Contribution
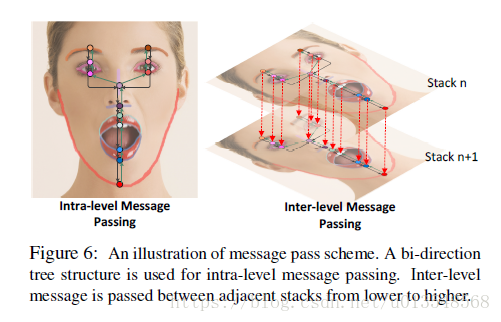
1、文章中的组件首先是一个提取边缘的网络,用的是hourglass,融合了人体姿态的几何变换核那篇文章,不过在那篇文章的基础上,作者不仅仅在不同的边缘之间进行message passing,在不同的stack的预测出来的结果上也进行了message passing,作者认为hourglass每一个小单元预测出来的结果的含义是不一样的。
2、用对抗网络来判断生成边缘的好坏
3、将边缘融合进landmark点的预测中
Network
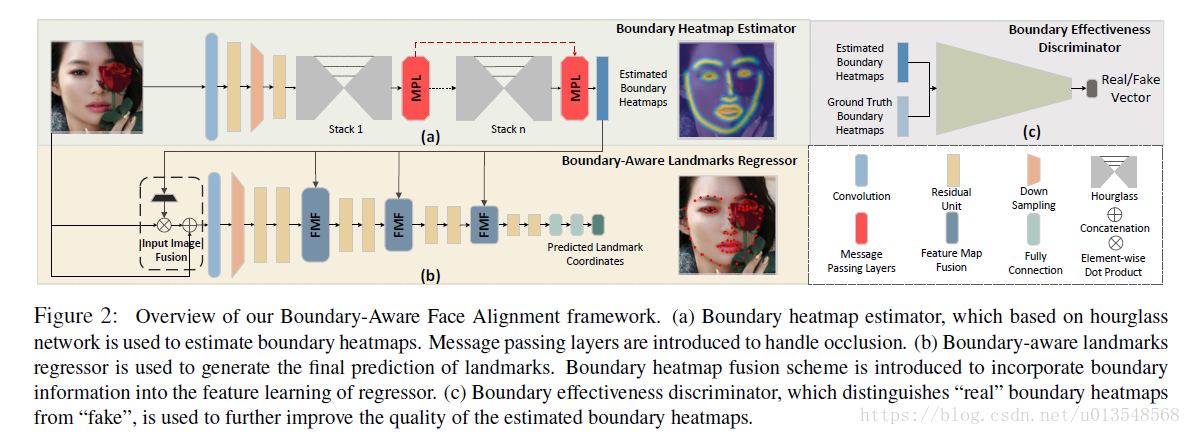
三个组件
- Boundary-Aware Landmark Regressor
- Boundary Heatmap Estimator
- Landmark-Based Boundary Effectiveness Discriminator
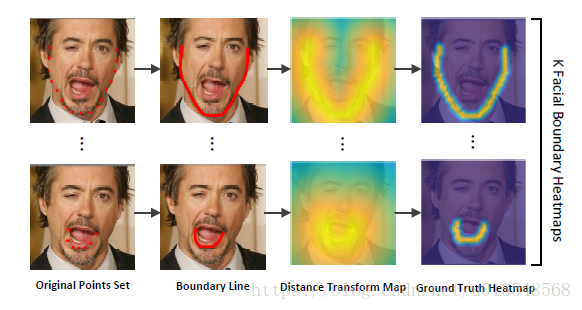
制作边缘标签
假设数据集中一共有L个landmark点, 。对于这L个关键点,又可以划分为K个子集,也即K个边缘, ,对于每一个子集 ,通过差值获得更加浓密的边缘曲线,这样生成了 ,然后 生成distance map ,然后由 生成 ,也即gt , 作用在 上面使得更关注与边缘区域

其中
的制作作者说是用了距离变化,个人理解是计算图像中的每个点距离对应的边缘的距离
边缘和landmark融合
首先边缘需要和Input image结合,结合的方式如下:
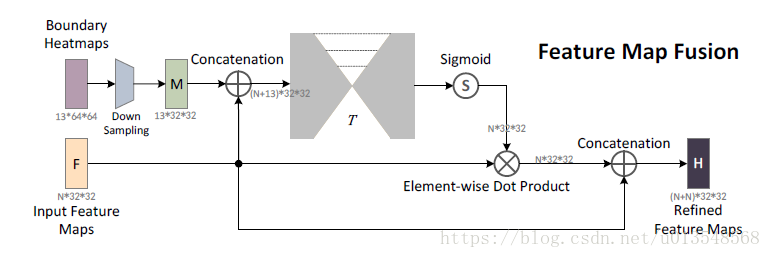

然后边缘与中间的特征的结合。作者通过实验证明和中间结果融合的越多,效果越好。

都是普通的特征融合,没什么好介绍的。
作者运用了message passing
参考论文Structured feature learning for pose estimation
不一样的是,作者不仅仅在不同的边缘map间进行消息传递(一共K张map),在不同的预测stack间产生的map间又进行了纵向的message passing,没什么说的也。
对抗学习来是的边缘更加鲁棒和尖锐
MSE损失是的边缘比较模糊。好的边缘有利于landmark点的预测,不好的边缘则不利于landmark点的预测,所以作者通过landmark点预测的好坏来判断边缘质量的好坏。对于预测出来的
,对应的关键点的集合是
,gt 的distance map是Dist,
的定义就是
是一个阈值,
是一个概率阈值,意思是说某一张边缘图预测出来的对应的关键点在Dist图上的值,也即距离边缘的距离响应小于
的概率小于
,就判断生成的质量不咋地。这个时候在最小化式5的对抗损失的时候,就变成了最小化D(G(I)).反之如果边缘的距离响应
的概率大于
就说明生成的边缘可以以假乱真,这个时候在最小化式5的对抗损失的时候,就变成了最大化化D(G(I))
作者运用对抗学习来使得边缘学习的更加有效哈

M是gt,然而G(I)是生成的heatmap

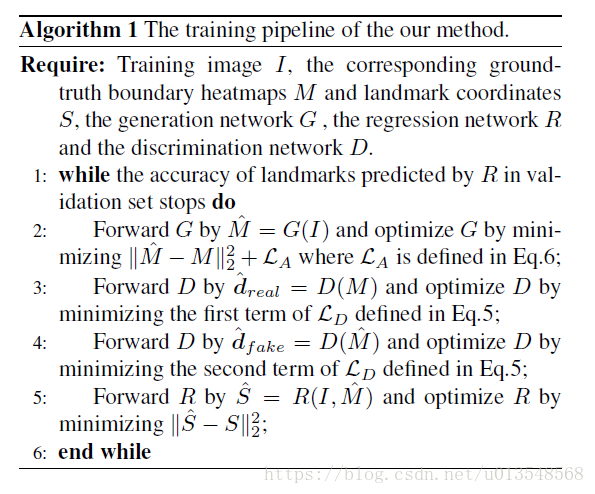
算法流程